
В промышленности наибольшее распространение получили асинхронные двигатели трехфазного тока. Рассмотрим устройство и принцип действия этих двигателей.
Принцип действия асинхронного двигателя основан на использовании вращающегося магнитного поля.
Для уяснения работы такого двигателя проделаем следующий опыт.
Укрепим подковообразный магнит на оси таким образом, чтобы его можно было вращать за ручку. Между полюсами магнита расположим на оси медный цилиндр, могущий свободно вращаться.
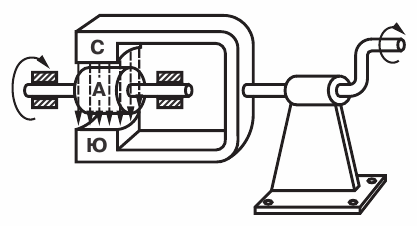
Рисунок 1. Простейшая модель для получения вращающегося магнитного поля
Начнем вращать магнит за ручку по часовой стрелке. Поле магнита также начнет вращаться и при вращении будет пересекать своими силовыми линиями медный цилиндр. В цилиндре, по закону электромагнитной индукции, возникнут вихревые токи, которые создадут свое собственное магнитное поле — поле цилиндра. Это поле будет взаимодействовать с магнитным полем постоянного магнита, в результате чего цилиндр начнет вращаться в ту же сторону, что и магнит.
Установлено, что скорость вращения цилиндра несколько меньше скорости вращения поля магнита.
Действительно, если цилиндр вращается с той же скоростью, что и магнитное поле, то магнитные силовые линии не пересекают его, а следовательно, в нем не возникают вихревые токи, вызывающие вращение цилиндра.
Скорость вращения магнитного поля принято называть синхронной , так как она равна скорости вращения магнита, а скорость вращения цилиндра — асинхронной (несинхронной). Поэтому сам двигатель получил название асинхронного двигателя . Скорость вращения цилиндра (ротора) отличается от синхронной скорости вращения магнитного поля на небольшую величину, называемую скольжением.
Обозначив скорость вращения ротора через n1 и скорость вращения поля через n мы можем подсчитать величину скольжения в процентах по формуле:
В приведенном выше опыте вращающееся магнитное поле и вызванное им вращение цилиндра мы получали благодаря вращению постоянного магнита, поэтому такое устройство еще не является электродвигателем . Надо заставить электрический ток создавать вращающееся магнитное поле и использовать его для вращения ротора. Задачу эту в свое время блестяще разрешил М. О. Доливо-Добровольский. Он предложил использовать для этой цели трехфазный ток.
Устройство асинхронного электродвигателя М. О. Доливо-Добровольского
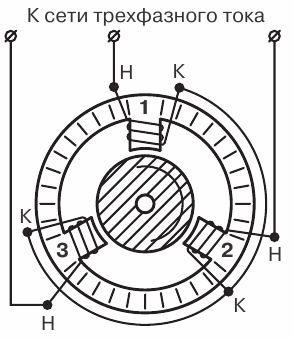
Рисунок 2. Схема асинхронного электродвигателя Доливо-Добровольского
На полюсах железного сердечника кольцевой формы, называемого статором электродвигателя , помещены три обмотки, сети трехфазного тока 0 расположенные одна относительно другой под углом 120°.
Внутри сердечника укреплен на оси металлический цилиндр, называемый ротором электродвигателя.
Если обмотки соединить между собой так, как показано на рисунке, и подключить их к сети трехфазного тока, то общий магнитный поток, создаваемый тремя полюсами, окажется вращающимся.
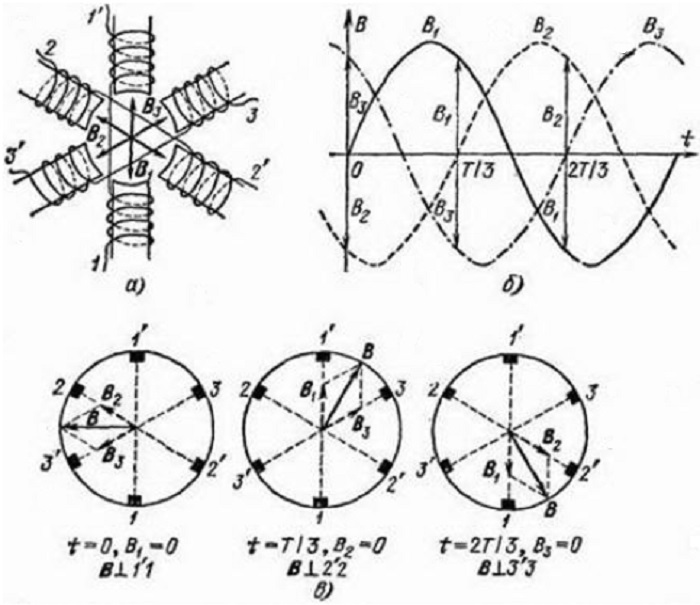
На рисунке 3 показан график изменения токов в обмотках двигателя и процесс возникновения вращающегося магнитного поля.
Рассмотрим — подробнее этот процесс.
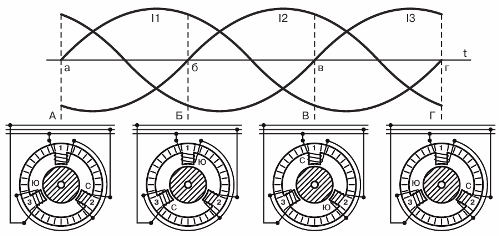
Рисунок 3. Получение вращающегося магнитного поля
В положении «А» на графике ток в первой фазе равен нулю, во второй фазе он отрицателен, а в третьей положителен. Ток по катушкам полюсов потечет в направлении, указанном на рисунке стрелками.
Определив по правилу правой руки направление созданного током магнитного потока, мы убедимся, что на внутреннем конце полюса (обращенном к ротору) третьей катушки будет создан южный полюс (Ю), а на полюсе второй катушки — северный полюс (С). Суммарный магнитный поток будет направлен от полюса второй катушки через ротор к полюсу третьей катушки.
 В положении «Б» на графике ток во второй фазе равен нулю, в первой фазе он положителен, а в третьей отрицателен. Ток, протекая по катушкам полюсов, создает на конце первой катушки южный полюс (Ю), на конце третьей катушки северный полюс (С). Суммарный магнитный поток теперь будет направлен от третьего полюса через ротор к первому полюсу, т. е. полюсы при этом переместятся на 120°.
В положении «Б» на графике ток во второй фазе равен нулю, в первой фазе он положителен, а в третьей отрицателен. Ток, протекая по катушкам полюсов, создает на конце первой катушки южный полюс (Ю), на конце третьей катушки северный полюс (С). Суммарный магнитный поток теперь будет направлен от третьего полюса через ротор к первому полюсу, т. е. полюсы при этом переместятся на 120°.
В положении «В» на графике ток в третьей фазе равен нулю, во второй фазе он положителен, а в первой отрицателен. Теперь ток, протекая по первой и второй катушкам, создаст на конце полюса первой катушки — северный полюс (С), а на конце полюса второй катушки — южный полюс (Ю), т. е. полярность суммарного магнитного поля переместится еще на 120°. В положении «Г» на графике магнитное поле переместится еще на 120°.
Таким образом, суммарный магнитный поток будет менять свое направление с изменением направления тока в обмотках статора (полюсов).
При этом за один период изменения тока в обмотках магнитный поток сделает полный оборот. Вращающийся магнитный поток будет увлекать за собой цилиндр, и мы получим таким образом асинхронный электродвигатель.
Напомним, что на рисунке 3 обмотки статора соединены «звездой», однако вращающееся магнитное поле образуется и при соединении их «треугольником».
Если мы поменяем местами обмотки второй и третьей фаз, то магнитный поток изменит направление своего вращения на обратное.
Такого же результата можно добиться, не меняя местами обмотки статора, а направляя ток второй фазы сети в третью фазу статора, а третью фазу сети — во вторую фазу статора.
Таким образом, изменить направление вращения магнитного поля можно переключением двух любых фаз.
Мы рассмотрели устройство асинхронного двигателя, имеющего на статоре три обмотки . В этом случае вращающееся магнитное поле двухполюсное и число его оборотов в одну секунду равно числу периодов изменения тока в одну секунду.
 Если на статоре разместить по окружности шесть обмоток, то будет создано четырехполюсное вращающееся магнитное поле . При девяти обмотках поле будет шестиполюсным.
Если на статоре разместить по окружности шесть обмоток, то будет создано четырехполюсное вращающееся магнитное поле . При девяти обмотках поле будет шестиполюсным.
При частоте трехфазного тока f , равной 50 периодам в секунду, или 3000 в минуту, число оборотов n вращающегося поля в минуту будет:
при двухполюсном статоре n = (50 х 60 ) / 1 = 3000 об/мин,
при четырехполюсном статоре n = (50 х 60 ) / 2 = 1500 об/мин,
при шестиполюсном статоре n = (50 х 60 ) / 3 = 1000 об/мин,
при числе пар полюсов статора, равном p : n = (f х 60 ) / p ,
Итак, мы установили скорость вращения магнитного поля и зависимость ее от числа обмоток на статоре двигателя.
Ротор же двигателя будет, как нам известно, несколько отставать в своем вращении.
Однако отставание ротора очень небольшое. Так, например, при холостом ходе двигателя разность скоростей составляет всего 3%, а при нагрузке 5 — 7%. Следовательно, обороты асинхронного двигателя при изменении нагрузки изменяются в очень небольших пределах, что является одним из его достоинств.
Рассмотрим теперь устройство асинхронных электродвигателей
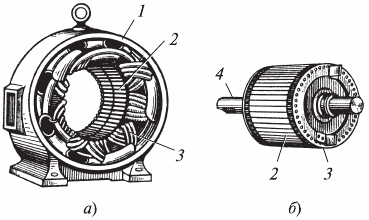
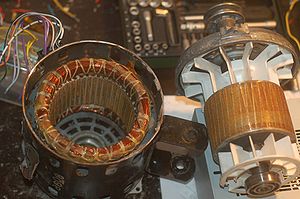
Статор современного асинхронного электродвигателя имеет невыраженные полюсы, т. е. внутренняя поверхность статора сделана совершенно гладкой.
Чтобы уменьшить потери на вихревые токи, сердечник статора набирают из тонких штампованных стальных листов.  Собранный сердечник статора закрепляют в стальном корпусе.
Собранный сердечник статора закрепляют в стальном корпусе.
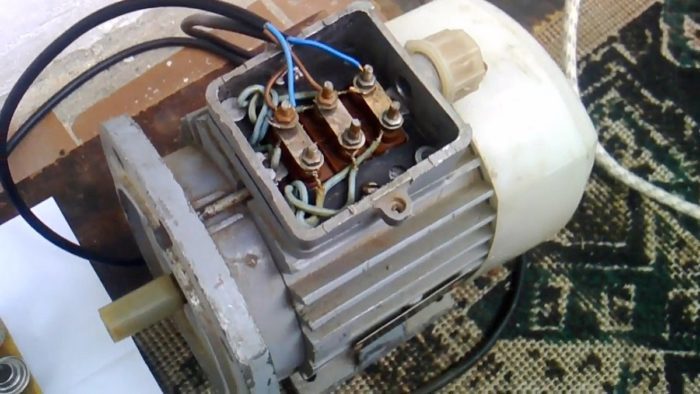
В пазы статора закладывают обмотку из медной проволоки. Фазовые обмотки статора электродвигателя соединяются «звездой» или «треугольником», для чего все начала и концы обмоток выводятся на корпус — на специальный изоляционный щиток. Такое устройство статора очень удобно, так как позволяет включать его обмотки на разные стандартные напряжения.
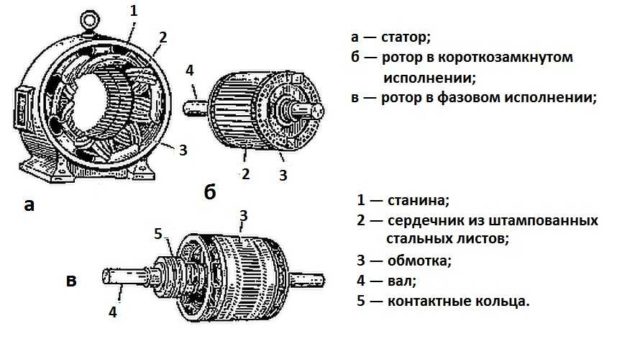
Ротор асинхронного двигателя , подобно статору, набирается из штампованных листов стали. В пазы ротора закладывается обмотка.
В зависимости от конструкции ротора асинхронные электродвигатели делятся на двигатели с короткозамкнутым ротором и фазным ротором .
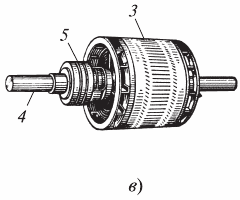
Обмотка короткозамкнутого ротора сделана из медных стержней, закладываемых в пазы ротора. Торцы стержней соединены при помощи медного кольца. Такая обмотка называется обмоткой типа «беличьей клетки». Заметим, что медные стержни в пазах не изолируются.
В некоторых двигателях «беличью клетку» заменяют литым ротором.
Асинхронный двигатель с фазным ротором (с контактными кольцами) применяется обычно в электродвигателях большой мощности и в тех случаях; когда необходимо, чтобы электродвигатель создавал большое усилие при трогании с места. Достигается это тем, что в обмотки фазного двигателя включается пусковой реостат.
Короткозамкнутые асинхронные двигатели пускаются в ход двумя способами:
1) Непосредственным подключением трехфазного напряжения сети к статору двигателя. Этот способ самый простой и наиболее популярный.
2) Снижением напряжения, подводимого к обмоткам статора. Напряжение снижают, например, переключая обмотки статора со «звезды» на «треугольник».
Пуск двигателя в ход происходит при соединении обмоток статора «звездой», а когда ротор достигнет нормального числа оборотов, обмотки статора переключаются на соединение «треугольником».
Ток в подводящих проводах при этом способе пуска двигателя уменьшается в 3 раза по сравнению с тем током, который возник бы при пуске двигателя прямым включением в сеть с обмотками статора, соединенными «треугольником». Однако этот способ пригоден лишь в том случае, если статор рассчитан для нормальной работы при соединении его обмоток «треугольником».
Наиболее простым, дешевым и надежным является асинхронный электродвигатель с короткозамкнутым ротором , но этот двигатель обладает некоторыми недостатками — малым усилием при трогании с места и большим пусковым током. Эти недостатки в значительной мере устраняются применением фазного ротора, но применение такого ротора значительно удорожает двигатель и требует пускового реостата.

Типы асинхронных электродвигателей
Основной тип асинхронных машин — трехфазный асинхронный двигатель . Он имеет три обмотки на статоре, смещенные в пространстве на 120°. Обмотки соединяются в звезду или треугольник и питаются трехфазным переменным током.
Двигатели малой мощности в большинстве случаев выполняются как двухфазные . В отличие от трехфазных двигателей они имеют на статоре две обмотки, токи в которых для создания вращающегося магнитного поля должны быть сдвинуты на угол π /2.
Если токи в обмотках равны по модулю и сдвинуты по фазе на 90°, то работа подобного двигателя ничем не будет отличаться от работы трехфазного. Однако такие двигатели с двумя обмотками на статоре в большинстве случаев питаются от однофазной сети и сдвиг, приближающийся к 90°, создается искусственным путем, обычно за счет конденсаторов.
Однофазный двигатель , имеющий только одну обмотку на статоре, практически неработоспособен. При неподвижном роторе в двигателе создается только пульсирующее магнитное поле и вращающий момент равен нулю. Правда, если ротор такой машины раскрутить до некоторой скорости, то далее она может выполнять функции двигателя.
В этом случае, хотя и будет только пульсирующее поле, но оно слагается из двух симметричных — прямого и обратного, которые создают неравные моменты — больший двигательный и меньший тормозной, возникающий за счет токов ротора повышенной частоты (скольжение относительно обратносинхронного поля больше 1).
В связи с изложенным однофазные двигатели снабжаются второй обмоткой, которая используется как пусковая. В цепь этой обмотки для создания фазового сдвига тока включают конденсаторы, емкость которых может быть достаточно велика (десятки микрофарад при мощности двигателя менее 1 кВт).
В системах управления используются двухфазные двигатели, которые иногда называют исполнительными . Они имеют две обмотки на статоре, сдвинутые в пространстве на 90°. Одна из обмоток, называемая обмоткой возбуждения, непосредственно подключается к сети 50 или 400 Гц. Вторая используется как обмотка управления.
Для создания вращающегося магнитного поля и соответствующего момента ток в обмотке управления должен быть сдвинут на угол, близкий к 90°. Регулирование скорости двигателя, как будет показано ниже, осуществляется изменением значения или фазы тока в этой обмотке. Реверс обеспечивается изменением фазы тока в управляющей обмотке на 180° (переключением обмотки).
Двухфазные двигатели изготовляются в нескольких исполнениях:
с короткозамкнутым ротором,
с полым немагнитным ротором,
с полым магнитным ротором.
Преобразование вращательного движения двигателя в поступательное движение органов рабочей машины всегда связано с необходимостью использования каких-либо механических узлов: зубчатых реек, винта и др. Поэтому иногда целесообразно выполнение двигателя с линейным перемещением ротора-бегунка (название ’’ротор” при этом может быть принято только условно — как движущегося органа).
В этом случае двигатель, как говорят, может быть развернут. Обмотка статора линейного двигателя выполняется так же, как и у объемного двигателя, но только должна быть заложена в пазы на всю длину максимального возможного перемещения ротора-бегунка. Ротор-бегунок обычно короткозамкнутый, с ним сочленяется рабочий орган механизма. На концах статора, естественно, должны находиться ограничители, препятствующие уходу ротора за рабочие пределы пути.

В асинхронном двигателе роль клочка сена играет магнитное поле, которое «бежит» по кругу, вырабатываемое совершенно неподвижными катушками статора. А роль ишачка играет ротор, который гонится за этим полем.
Ну а как только ишачок побежал, главная задача — научиться им управлять. И задача эта не из легких.
- Бегущее магнитное поле
- Поведение ротора в бегущем магнитном поле
- Схемы и способы подключения
- Как подключить двигатель по схеме «звезда»
- Как подключить электромотор по схеме «треугольник»
- Подключение трехфазного двигателя в однофазную сеть
- Устройство (статор и ротор асинхронных двигателей)
- Где применяются
- Получение вращающегося магнитного поля
- Принцип работы
- Изменение частоты вращения ротора
- Способы торможения двигателей
Бегущее магнитное поле
Статор асинхронных двигателей, подключаемых к трехфазной сети, состоит из трех электромагнитов. На них подается напряжение разных фаз сети. А так как разные фазы работают — нарастают и уменьшаются — со сдвигом во времени друг от друга, аналогично будет нарастать и уменьшаться магнитное поле в катушках. Сначала поле возникнет и будет расти в катушке 1 фазы, через одну треть периода точно так же возникнет и будет возрастать поле во второй фазе, а поле в первой при этом постепенно и плавно, по синусоиде, сначала перестанет нарастать, а потом начнет уменьшаться. Все повторится и для катушки третьей фазы — поле появится, будет возрастать, тогда как поле во второй сначала остановит свой рост, потом пойдет на спад. А в это время поле в первой фазе уже дойдет до нуля и будет возрастать в отрицательную сторону.


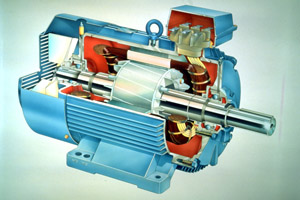
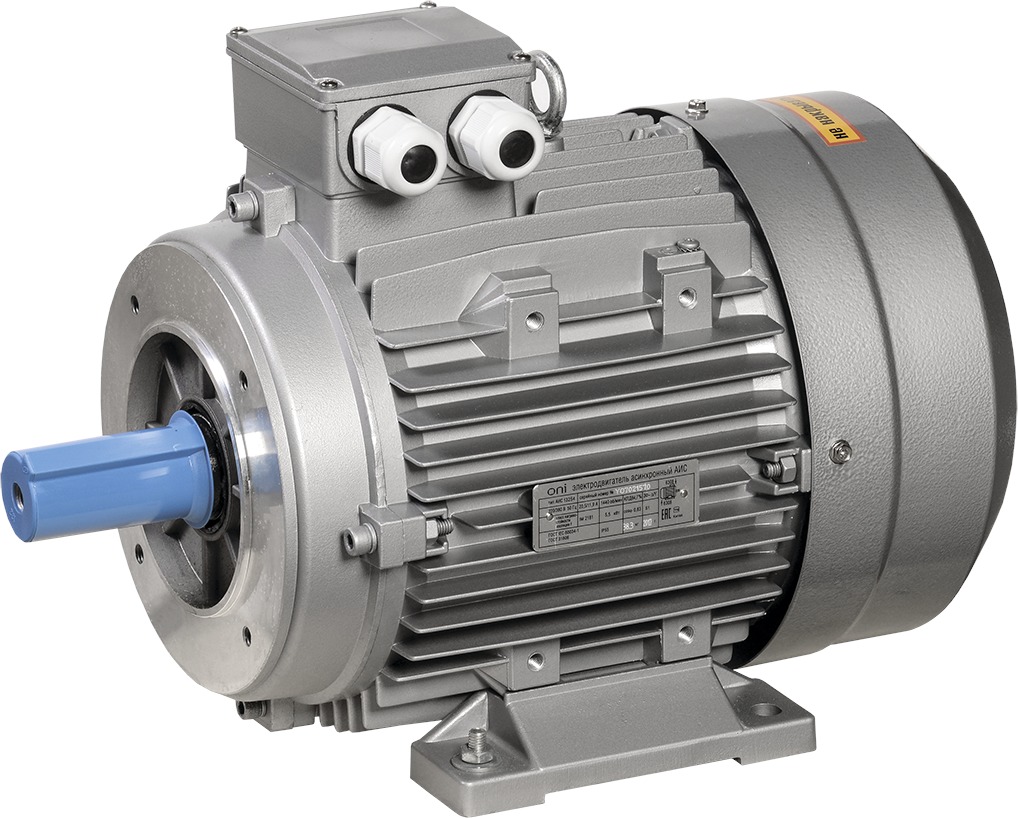
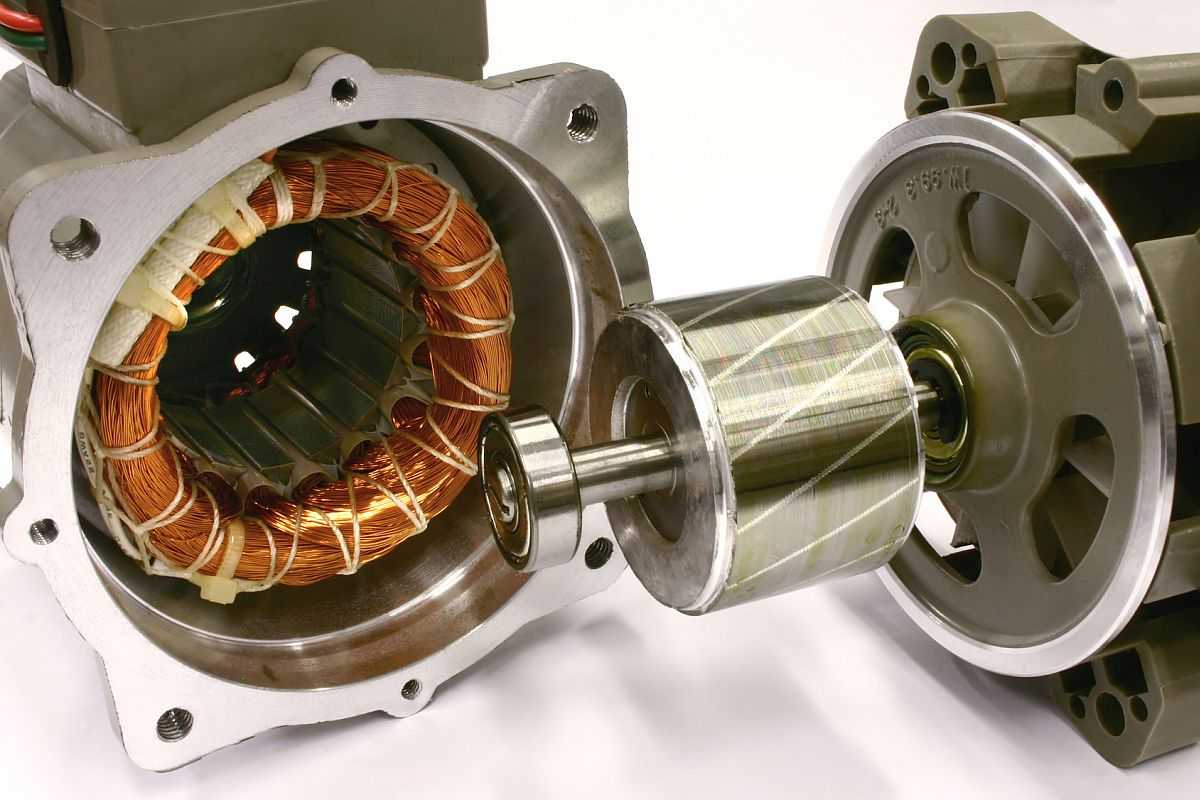
Трехфазные асинхронные двигатели, разрез
1 – вал ротора (сталь); 2 – обмотка статора (медный эмалированный провод);
3 – сердечник статора (электротехническая сталь, сплав железа и кремния);
4 – проводники ротора (алюминий); 5 – сердечник ротора (эл. т. сталь);
6 – крыльчатка вентилятора (алюминий);
7 – литой корпус двигателя (сталь)
Образование бегающего по кругу вектора магнитного поля
На каждой фазовой катушке статора от трехфазного напряжения, изменяющегося синусоидально со сдвигом каждой фазы относительно другой на 120°, возникает такая сила индукции, что результирующий вектор направления магнитного поля начинает бегать по кругу с угловой скоростью, равной частоте напряжения в трехфазной сети
Если в статоре сделать только три обмотки, по числу фаз в питающем напряжении, то магнитное поле будет вращаться с той же частотой, что и напряжение, то есть 50 раз за одну секунду. Но на практике их делают гораздо больше.

Тогда бегающее по кругу поле будет иметь частоту вращения меньше, но вращение при этом станет более плавным.
Поведение ротора в бегущем магнитном поле
«Обмотки» ротора представляют собой проводники, расположенные «почти» параллельно валу ротора и набранные по кругу в виде «беличьей клетки». Это не обмотки, так как там ничего не намотано, а проводники, воткнутые в два металлических круга. То есть через эти металлические круги, накоротко замкнутые.

«Беличья клетка» является замкнутой накоротко обмоткой, которая заполнена пакетом-сердечником, набранным из поперечных тонких пластин из электротехнической стали
Когда на ротор воздействует внешнее изменяющееся магнитное поле статора, в роторе наводятся кольцевые токи, которые, в свою очередь, создают магнитное поле. Это поле, усиленное сердечником, направлено так, что ротор начинает вращаться вслед за бегущим магнитным полем статора. Вращение направлено в направлении «догнать» убегающую волну. Ротор разгоняется, но, по мере того, как он будет догонять волну статора, наводки в нем будут все меньше и меньше. Он начнет «приотставать» (от силы трения или от силы сопротивления механической нагрузки на вал ротора), но усиливающаяся от этого в нем индукция снова толкает ротор к вращению. Такой принцип порождает некоторое рассогласование частот: частота напряжения, которая является причиной движения ротора, не изменяется во времени — стабильно 50 герц, а частота вращения то догоняет, то отстает. Такие несоответствия могут быть незаметны там, где частота не очень важна, но из-за них двигатель и называется асинхронным.
Все мы это прекрасно видели и слышали, когда включали вентилятор. Он сначала набирает скорость, хорошо «берется за дело». Только потом как-то слегка «проваливается» — крутится по инерции, но опять «спохватывается» и «поддает газу».
Идеальный случай вращения в таком двигателе — это когда совсем нет трения и сопротивления, это холостой ход такого мотора. Тогда скорость определяется формулой вращения самого бегущего поля от статора

Здесь nr – скорость вращения в оборотах в минуту,
fu – частота питающего напряжения,
p – число катушек статора в каждой фазе.
Например, если, как нарисовано на картинке с красной стрелочкой вращения поля статора, в статоре три катушки, то есть по одной на каждую фазу, то получим
nr = 60 50/1 = 3000 (об./мин) или 50 об./с. То есть скорость вращения равна частоте напряжения в сети. Увеличением количества обмоток в статоре можно добиться снижения скорости вращения
Во многих случаях точная частота вращения двигателя действительно не так важна, поэтому электродвигатели асинхронные трехфазные находят широкое применение.
Трехфазные электродвигатели имеют и другой недостаток: циклические токи ротора вызывают его непрерывный разогрев, поэтому и делают кольцевые металлические пластины с ребрами для охлаждения воздухом при вращении.
Схемы и способы подключения
Так как есть несколько обмоток внутри двигателя — обмотки статора, — и сеть переменного тока бывает однофазной, а бывает трехфазной, то и схема включения всего этого хозяйства допускает вариации.
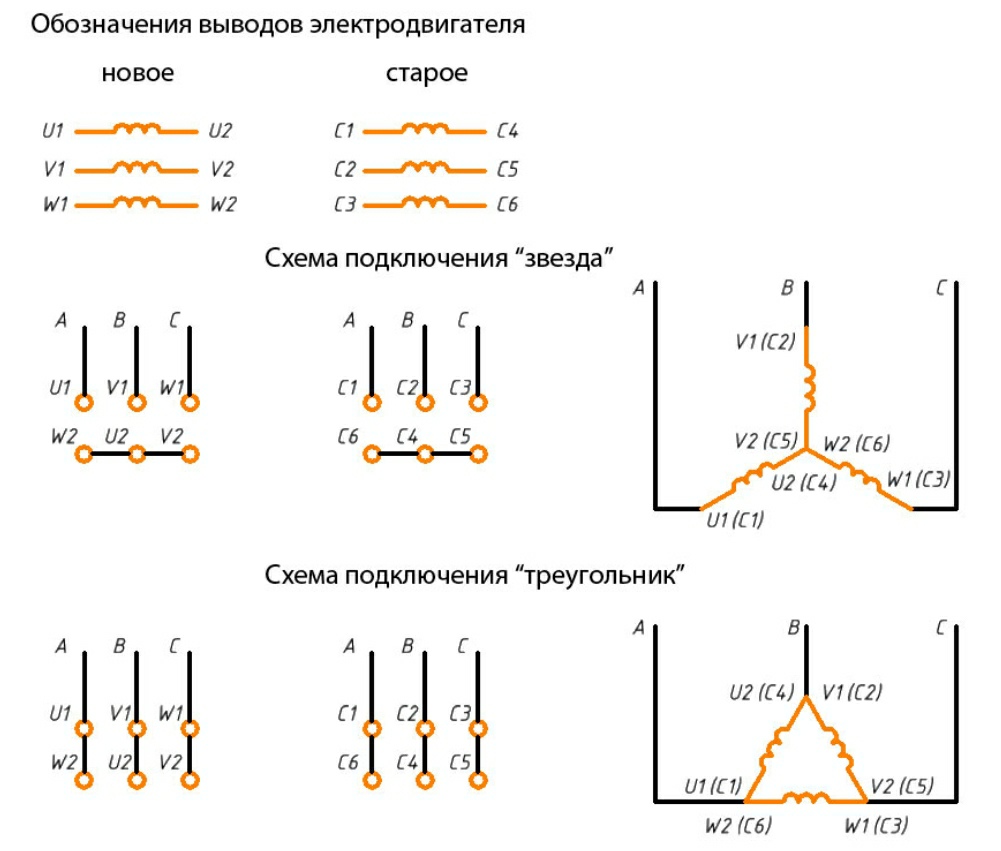
Обмоток на статоре обычно три. Ну а если их больше, то все равно обмотки каждой фазы внутри уже соединены последовательно. То есть в качестве выходных клемм максимум может быть 6. И их подсоединить к сети можно по-разному. Систем обозначений клемм две. На старых обозначались буквами С и цифрами 1,2,3 — начала обмоток; цифрами 4,5,6 — концы обмоток. В новых обозначениях для разных обмоток употребляются буквы U, V, W, а для начал и концов цифры 1 и 2 соответственно.

Как подключить двигатель по схеме «звезда»
При соединении обмоток по типу «звезда» концы обмоток нужно объединить, а на клеммы начала обмоток подать напряжения фаз из сети.

Здесь использованы обозначения клемм электродвигателей трехфазных, применяемые на схемах, старые и новые
При подключении типа «звезда» нулевой провод из сети желательно подавать на общую клемму двигателя. Это защитит его от порчи в случае перекоса фаз в сети.
Как подключить электромотор по схеме «треугольник»
Подключить трехфазный двигатель обмотками в «треугольник» в сеть переменного тока не сложнее. Надо начало одной обмотки соединять с концом следующей. И еще все начала подключить к фазным проводам переменного тока.



Два эти подключения — «звезда» и «треугольник» — в сети дают разные результаты по токам и мощностям. В «звезде» на каждую обмотку подано фазное напряжение 220 В, а две обмотки вместе нагружены линейным напряжением в 380 В. Протекающие в обмотках токи при этом меньше, чем при конфигурации «треугольник». Отсюда и работа отличается: «звезда» дает мягкий запуск, но при работе развивает меньшую мощность, чем «треугольник». Зато «треугольник» при запуске дает большие стартовые токи, превышающие номинал раз в 7–8.
Чтобы сочетать преимущества обеих конфигураций, коммутацию делает особая схема. Она при запуске двигателя коммутирована как «звезда», а при достижении определенной мощности переключается в вариант «треугольник». В этом случае (и в других случаях с постоянными подключениями обмоток), на входном клеммнике оставляют только 3 или 4 клеммы, и вариантов по переключению обмоток по своему усмотрению не остается. В этом случае просто подключаются фазы в нужном порядке.
Подключение трехфазного двигателя в однофазную сеть
Трехфазное напряжение нашей сети можно представить как одну и ту же фазу, только повторенную еще два раза со сдвигом, сначала на 120°, потом плюс еще на столько же, то есть в результате на 240°. И такое напряжение вполне схематически посильно «добыть» из одной выделенной фазы. Однако когда мы запускаем «бегущее поле» статора, совсем не обязательно делать его именно с таким сдвигом между поданными на обмотки фазами. Потому что увеличение количества полюсов в обмотках проявляется как уменьшение скорости вращения, но механизм работает. Поэтому разработаны простые схемы получения сдвинутых фаз из однофазной линии не под таким углом, а под 90°. Это можно сделать простой схемой, дающей подключение трехфазного двигателя в однофазную сеть с применением одного конденсатора. Результатом является снижение мощности двигателя. При маркировке двигателей, которые можно использовать в однофазной сети 220 В и в сети 380 В трехфазной, так и пишется — двигатель 220/380, а который предназначен для работы только в трехфазной — двигатель 380.

Схема подключения «звезда» в этом случае дает потерю мощности, поэтому для более полного использования двигателя при подключении к однофазному напряжению чаще применяют «треугольник».
В современной электротехнике из всех типов электродвигателей на переменном токе трехфазный двигатель получил наиболее широкое распространение. Такая популярность связана с его экономичностью и удобством в эксплуатации. Чтобы понять основную идею конструкции, основанной на применении трехфазного тока, и принцип работы двигателя с вращающимся магнитным полем, мы подготовили подробный материал.
В статье разобраны главные принципы работы трехфазных асинхронных двигателей, характеристики и различия в их устройстве. В качестве бонуса в статье читатель найдет видео c наглядным разбором устройства. Интересующие подробности можно уточнить в комментариях, эксперты ответят на любые ваши вопросы.
Устройство (статор и ротор асинхронных двигателей)
Трехфазный асинхронный двигатель состоит из неподвижного статора и ротора. Три обмотки размещены в пазах на внутренней стороне сердечника статора асинхронного двигателя. Обмотка же ротора асинхронного двигателя не имеет электрического соединения с сетью и с обмоткой статора. Начало и концы фаз обмоток статора присоединяют к зажимам в коробке выводов по схеме звезда или треугольник.
Асинхронные двигатели в основном различаются устройством ротора, который бывает двух типов: фазный или короткозамкнутый. Чтобы лучше понять работу трехфазного двигателя, необходимо разобраться, что такое асинхронный двигатель и принцип его действия.
Обмотка короткозамкнутого ротора асинхронного двигателя выполняется на цилиндре из медных стержней и называется “беличьей клеткой”. Торцевые концы стержней замыкают металлическими кольцами. Пакет ротора набирают из электротехнической стали. В двигателях меньшей мощности стержни заливают алюминием. Фазный ротор и статор имеют трехфазную обмотку. Фазы обмотки соединяют звездой или треугольником и ее свободные концы выводят на изолированные контактные кольца.
Где применяются
Трехфазные электродвигатели — довольно емкое понятие, включающее в себя разные виды по назначению, конструкции, и другим факторам электрических машин, делятся на три большие группы:
- общепромышленные (в свою очередь имеют очень много различных специальных исполнений на основе стандартной модификации);
- крановые (делятся по типу ротора: с фазным или короткозамкнутым);
- взрывозащищенные (тоже подразделяются на два основных типа: нефтехимические и рудничные).
Получение вращающегося магнитного поля
При наличии трехфазного тока, то есть системы трех токов, сдвинутых по фазе относительно друг друга на треть периода, очень легко получить вращающееся магнитное поле без механического вращения магнита и без всяких дополнительных устройств.
Вращающееся поле создается трехфазной системой токов, подводимых к обмоткам статора, которые могут быть соединены между собой либо звездой, либо треугольником. Если в такое вращающееся поле поместить металлическое кольцо (или, еще лучше, катушку), то в нем будут индуцироваться токи так же, как если бы кольцо (катушка) вращалось в неподвижном поле.

Обмотка статора асинхронного двигателя в виде трех катушек уложена в пазы, расположенные под углом в 120 градусов. Начало и конца катушек обозначаются соответственно буквами A, B, C и X, Y, Z. При подаче на катушки трехфазного напряжения в них установятся токи Ia, Ib, Ic и катушки создадут собственное переменное магнитное поле.
Ток в любой катушке положительный, когда он направлен от начала к ее концу и отрицательный при обратном направлении. Векторы намагничивающей силы совпадают с осями катушек, а их величина определяется значениями токов, направление результирующего вектора совпадает с осью катушки.
Вектор результирующей намагничивающей силы поворачивается на 120 градусов сохраняя величину совпадает с осью соответствующей катушки. Таким образом за период, результирующее магнитное поле статора совершает оборот с неизменной скоростью. Работа трехфазного асинхронного двигателя основана на взаимодействии вращающегося магнитного поля с токами, наводимыми в проводниках ротора.
Принцип работы
Принцип работы двух и многофазных двигателей был разработан Николой Теслой и запатентован. Доливо-Добровольский усовершенствовал конструкцию электродвигателя и предложил использовать три фазы вместо двух, используемых Н. Теслой.

Совокупность моментов созданных отдельными проводниками образует результирующий вращающий момент двигателя, возникает электромагнитная пара сил, которая стремится повернуть ротор в направлении движения электромагнитного поля статора.
Ротор приходит во вращение приобретает определенную скорость, магнитное поле и ротор вращаются с разными скоростями или асинхронно. Применительно к асинхронным двигателям, скорость вращения ротора всегда меньше скорости вращения магнитного поля статора.
Вращающий момент двигателя создается силами взаимодействия магнитного поля и токов, индуцируемых им в роторе, а сила этих токов определяется относительной частотой вращения поля по отношению к ротору, который сам вращается в ту же сторону, что и поле.
Поэтому, если бы ротор вращался с той же частотой, что и поле, то никакого относительного движения их не было бы. Тогда ротор находился бы в покое относительно поля и в нем не возникала бы никакая индуцированная э. д. с., то есть в роторе не было бы тока и не могли бы возникнуть, силы, приводящие его во вращение. Отсюда ясно, что двигатель описываемого типа может работать только при частоте вращения ротора, несколько отличающейся от частоты вращения поля, то есть от частоты тока.
Поэтому такие двигатели в технике принято называть «асинхронными» (от греческого слова «синхронос» – совпадающий или согласованный во времени, частица «а» означает отрицание). Если машины, приводимые в действие двигателем, требуют иной частоты вращения, чем этот двигатель дает, то предпочитают применять зубчатые или ременные передачи с различными передаточными числами.
Само собой разумеется, что при возрастании нагрузки двигателя, то есть отдаваемой им механической мощности, должен возрастать не только ток в роторе, но и ток в статоре для того, чтобы двигатель мог поглощать из сети соответствующую электрическую мощность. Поэтому при работе с двигателями необходимо твердо соблюдать следующие правила:
- Необходимо всегда подбирать двигатель такой мощности, какую фактически требует приводимая им в действие машина.
- Если нагрузка двигателя не достигает 40 % нормальной, а обмотки статора включены треугольником, то целесообразно переключить их на звезду.
- Для того чтобы изменить направление вращения вала двигателя на обратное, необходимо поменять местами два линейных провода, присоединенных к двигателю. Это легко осуществить при помощи двухполюсного переключателя.
Это осуществляется автоматически вследствие того, что ток в роторе также создает в окружающем пространстве свое магнитное поле, воздействующее на обмотки статора и индуцирующее в них некоторую э. д. с. Связь между магнитным потоком ротора и статора, или, как говорят, «реакция якоря», обусловливает изменения тока в статоре и обеспечивает согласование электрической мощности, отбираемой из сети, с механической мощностью, отдаваемой двигателем.
В асинхронных двигателях с большим моментом инерции необходимо увеличение вращающего момента с одновременным ограничением пусковых токов – для этих целей применяют двигатели с фазным ротором. Для увеличения начального пускового момента в схему ротора включают трехфазный реостат.
В начале пуска он введен полностью, пусковой ток при этом уменьшается. При работе реостат полностью выведен. Для пуска асинхронных двигателей с короткозамкнутым ротором применяют три схемы: с реактивной катушкой, с автотрансформатором и с переключением со звезды на треугольник. Рубильник последовательно соединяет реактивную катушку и статор двигателя.
Когда скорость ротора приблизится к номинальной, замыкается рубильник, он закорачивает катушка и статор переключаются на полное напряжение сети. При автотрансформаторном пуске по мере разгона двигателя, автотрансформатор переводится в рабочее положение, в котором на статор подается полное напряжение сети. Пуск асинхронного двигателя с предварительным включением обмотки статора звездой и последующим переключением ее на треугольник дает трехкратное уменьшение тока.

Для предупреждения этой опасности следует при напряжениях свыше 150 В относительно Земли заземлять станины и кожухи электрических машин и трансформаторов, то есть надежно соединять их металлическими проводами или стержнями с Землей. Это выполняется по специальным правилам, которые необходимо строго соблюдать во избежание несчастных случаев.
Трёхфазный двигатель приспособлен к трёхфазной сети, а к однофазной сети лучше подходит двухфазный двигатель со сдвигом фазы во второй обмотке либо через конденсатор (конденсаторные двигатели), либо через индуктивность.
Отличия подключения трехфазного асинхронного двигателя с одинарным или двойным напряжением иногда приводят к выходу из строя мотора – если не обратить внимание на то, какое напряжение верхнее, а какое нижнее, можно его подключить неправильно и он сгорит.
Когда мы включаем в сеть ненагруженный двигатель, то в первые моменты равно или близко к нулю, частота вращения поля относительно ротора велика и индуцированная в роторе э. д. с. соответственно также велика – она раз в 20 превосходит ту э. д. с., которая возникает в роторе при работе двигателя с нормальной мощностью. Ток в роторе при этом тоже значительно превосходит нормальный.
Возможно, вам будет интересно также почитать про малоизвестные факты о двигателях постоянного тока в другой нашей статье.
Изменение частоты вращения ротора
Параллельные обмотки двух фаз образуют одну пару полюсов сдвинутые в пространстве на 120 градусов. Последовательное соединение обмоток образует две пары полюсов, что дает возможность уменьшить скорость вращения в два раза. Для регулирования скорости вращения ротора изменением частоты тока используют отдельный источник тока или преобразователь энергии с регулируемой частотой, выполненный на тиристорах.
Двигатель развивает в момент пуска довольно значительный вращающий момент, и так как инерция его сравнительно невелика, то частота вращения ротора быстро нарастает и почти сравнивается с частотой вращения поля, так что относительная частота их становится почти равной нулю и ток в роторе быстро спадает.
Для двигателей малой и средней мощности кратковременная перегрузка их при пуске не представляет опасности, при запуске же очень мощных двигателей (десятки и сотни киловатт) применяются специальные пусковые реостаты, ослабляющие ток в обмотке; по мере достижения нормальной частоты вращения ротора эти реостаты постепенно выключают.
По мере того, как возрастает нагрузка двигателя, частота вращения ротора несколько уменьшается, частота вращения поля относительно ротора возрастает, и вместе с тем растут ток в роторе и развиваемый двигателем вращающий момент.
Однако для изменения мощности двигателя от нуля до нормального значения требуется очень небольшое изменение частоты вращения ротора, примерно до 6 % от максимального значения. Таким образом, асинхронный трехфазный двигатель сохраняет почти постоянную частоту вращения ротора при очень широких колебаниях нагрузки.
Регулировать эту частоту в принципе возможно, но соответствующие устройства сложны и неэкономичны и потому на практике применяются очень редко. Если машины, приводимые в действие двигателем, требуют иной частоты вращения, чем этот двигатель дает, то предпочитают применять зубчатые или ременные передачи с различными передаточными числами.
Способы торможения двигателей
При торможении противовключением меняются два провода соединяющих трехфазную сеть с обмотками статора, изменяя при этом направление движения магнитного поля машины. При этом наступает режим электромагнитного тормоза. Для динамического торможения обмотка статора отключается от трехфазной сети и включается в сеть постоянного тока. Неподвижное поле статора заставляет ротор быстро останавливаться.
Для лучшего понимания механизмов торможения двигателей рекомендуем также подробнее прочитать все что нужно знать о шаговых электродвигателях.
После отключения от сети электродвигатель продолжает движение по инерции. При этом кинетическая энергия расходуется на преодоление всех видов сопротивлений движению. Поэтому скорость электродвигателя через промежуток времени, в течение которого будет израсходована вся кинетическая энергия, становится равной нулю.
Такая остановка электродвигателя при движении по инерции называется свободным выбегом. Многие электродвигатели, работающие в продолжительном режиме или со значительными нагрузками, останавливают путем свободного выбега.
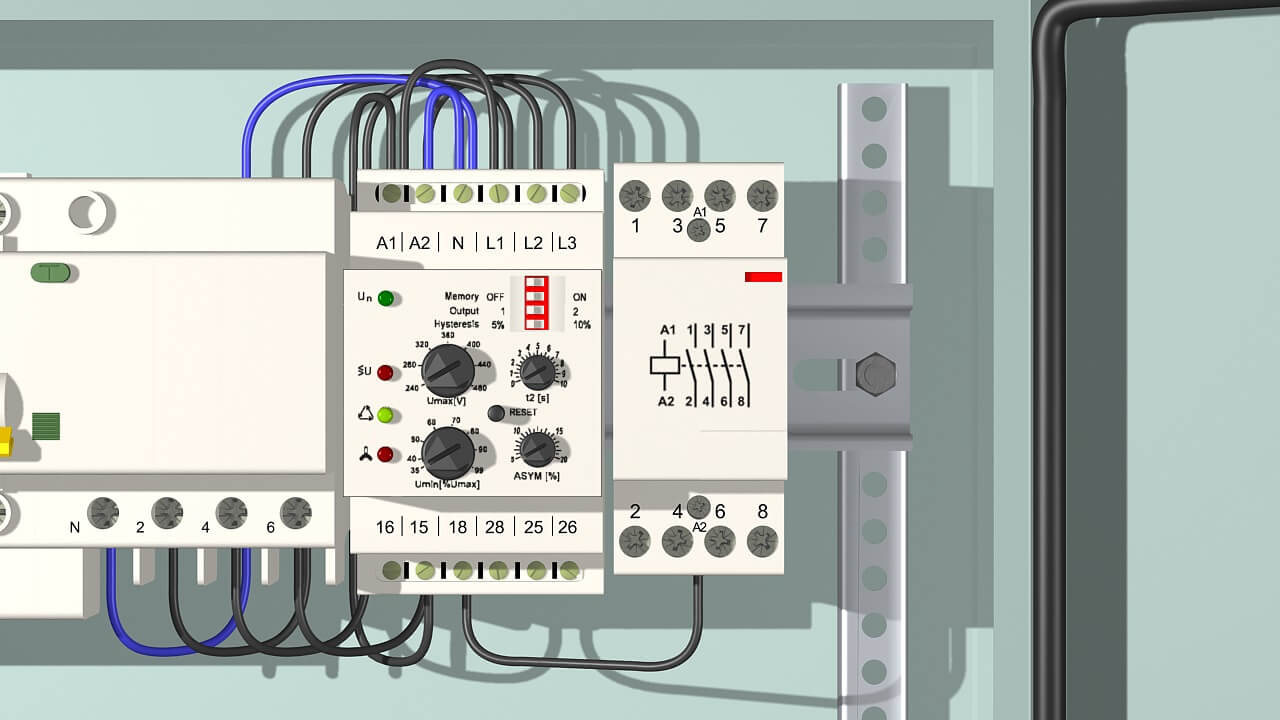
Более грубой и универсальной защитой, обязательной по правилам эксплуатации и обычно достаточной при правильно подобранных параметрах, является установка трёхфазных автоматических выключателей (по одному на двигатель), которые отключают питание в случае длительного (до несколько минут) превышения номинального тока по любой из фаз, что является следствием перегрузки двигателя, перекоса или обрыва фаз.