

Это мой первый проект на Ардуино. Так что сильно не пинайте если что .
Итак начнем. Вводные данные: машина Toyota Town Ace NOAH 2001 года выпуска (на которой мультируля не было ни в какой комплектации) и мультируль с 16 клавишами и рычагом круиз-контроля от Toyota Prius в 20 кузове.


По поводу инсталляции приусовского руля в свою машину я тут расписывать не буду — слишком много букв и все не по теме данного сообщества ( кому интересно все есть в БЖ). Остановлюсь конкретно на подключении клавиш.
Цель:
1. Подключить клавиши управления магнитолой к магнитоле.
2. При нажатии на "A/C AUTO" — тройное моргание аварийкой (спасибо)
3. Клавиша "TEMP+-" — управление сдвижной дверью. При нажатии дверь движется, при отпускании останавливается, при двойном нажатии движется до конца.
4. Клавиши в нижнем правом кружке дублируют такие же на машине, только клавиша обогрева переднего стекла управляет обогревом зеркал с задержкой отключения 2-3 минуты (подберу в процессе эксплуатации)
5. Клавиша "INFO" — омыватель фар.
6. Клавиша "MAP" — включение, отключение обгонной камеры.
7. При включении обгонной камеры-переключение клавиш управления магнитолой на управление настройками обгонной камеры.
Когда я написал себе этот список, то немного даже пригрустнул. Максимум что я делал на ардуине — это "моргал" светодиодами и крутил шаговик по скачанному скетчу. Не говоря уж об остальной обвязке в виде диодов, оптопар и прочей электронной начинке. Так же пришлось познакомиться со сдвиговым регистром, т.к. своих выходов для моего проекта у ардуины не хватало.
Но в самом начале пришлось поработать паяльником в самом руле.

Нарисовал в layout60 плату.
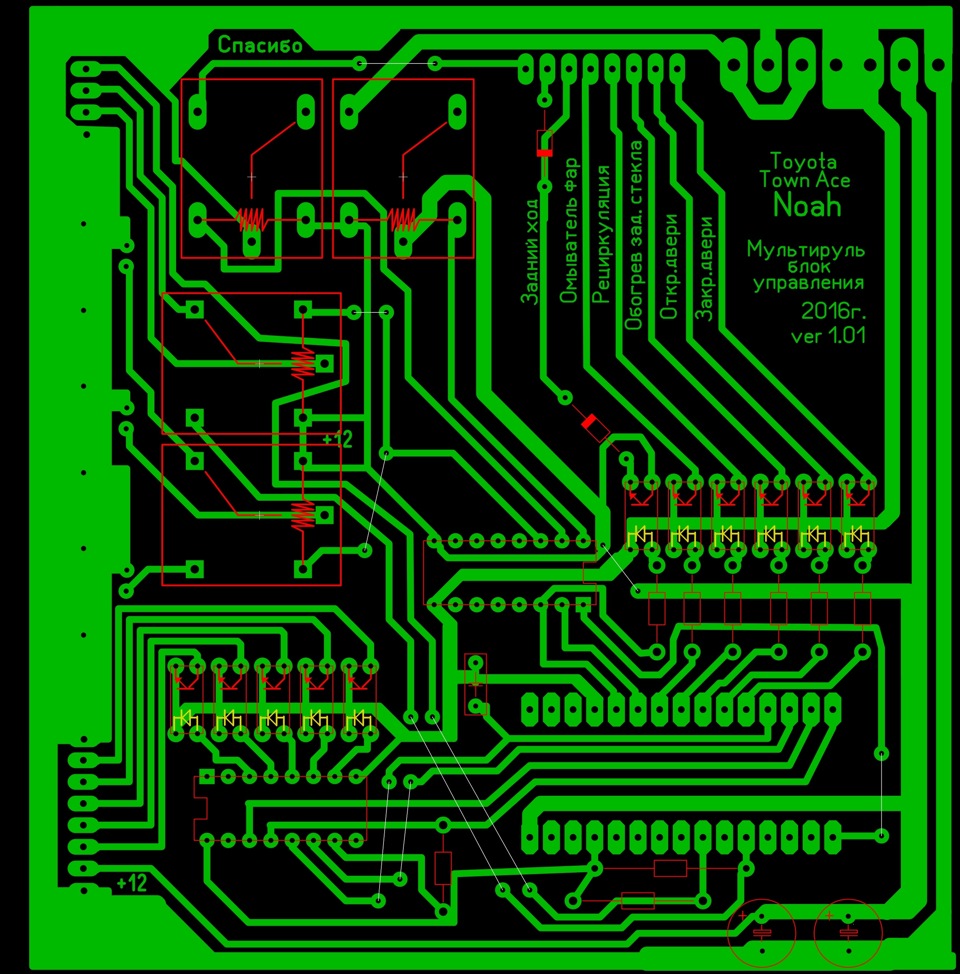
Сделал её по ЛУТ технологии.
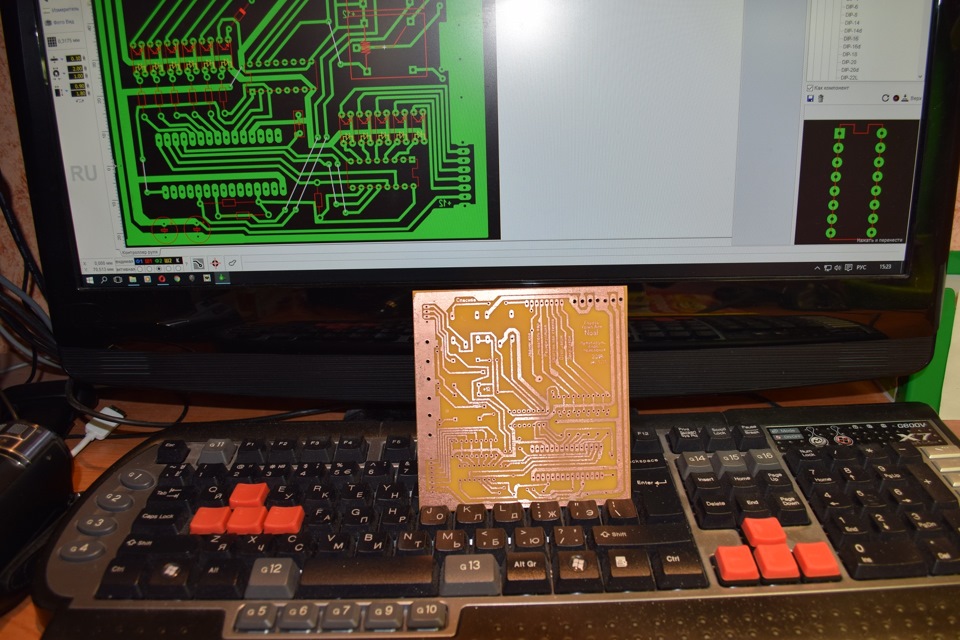
Правда забыл про сопротивления между сдвиговым регистром и оптопарами( пришлось подпаивать к ножкам оптопар), и про предохранители( пришлось резать дорожки и подпаиваться).
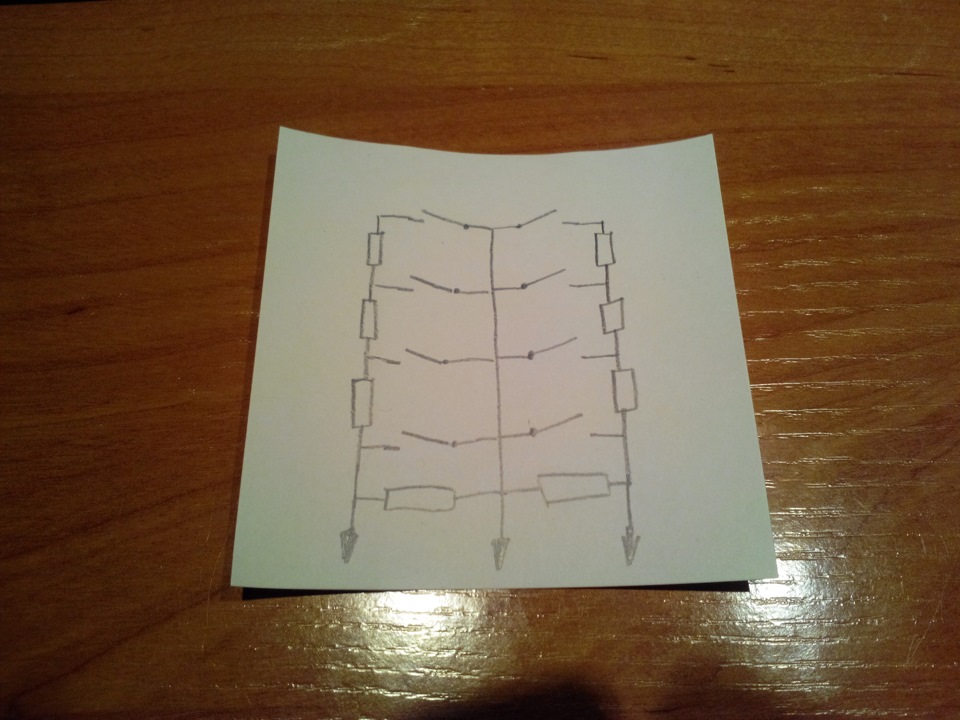
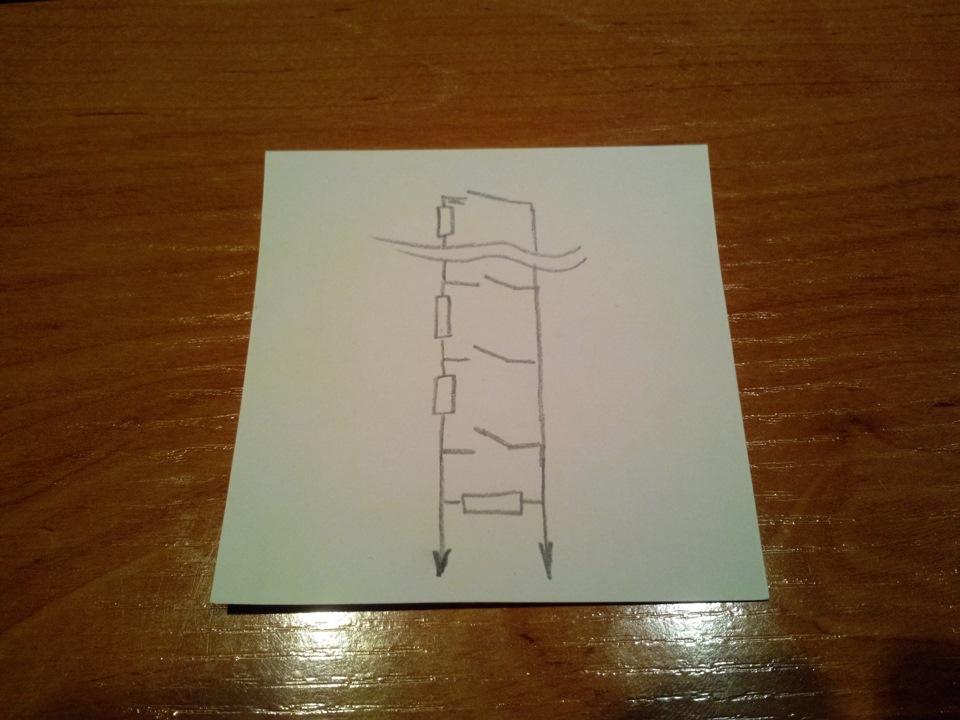
Схема. По ссылке можно скачать в лучшем качестве.
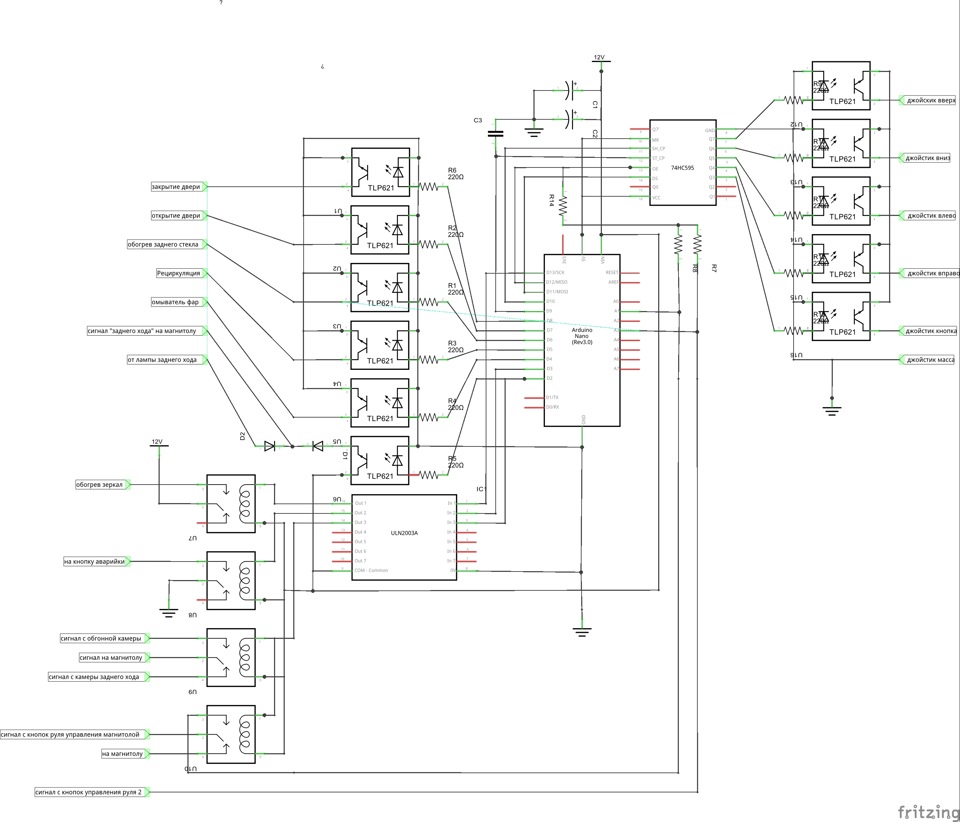
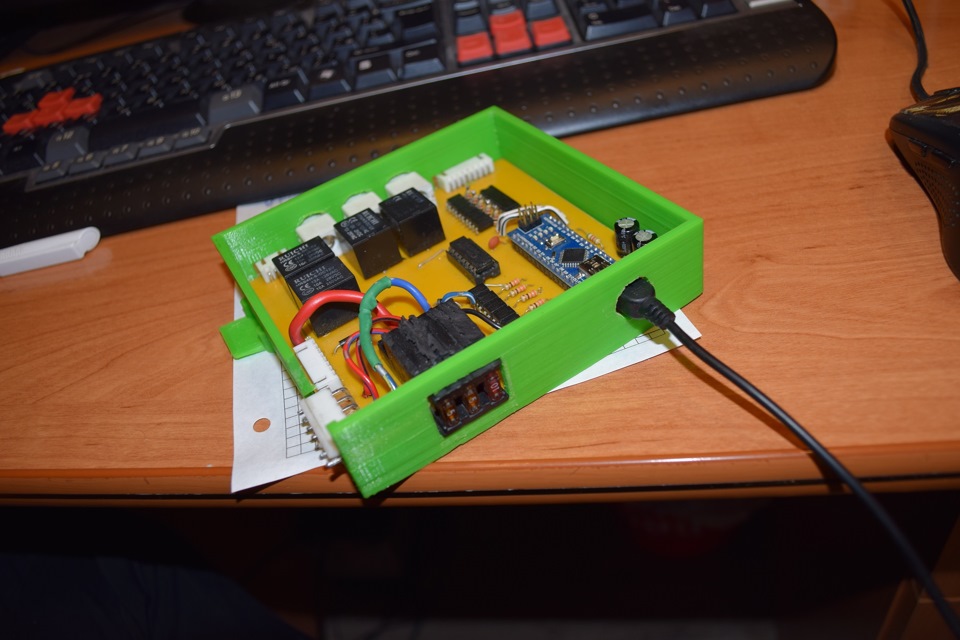
Почти все выходы оказались слаботочными и управлялись оптопарами. Реле поставил на обогрев зеркал, на кнопку аварийки, на переключение сигнала между камерой заднего хода и обгонной камерой и на переключение сигнала с кнопок управления магнитолой (на голову или вместо джойстика обгонки). Корпус напечатал на 3d-принтере.
И принялся за саму программу.
Сначала написал скетч по опросу кнопок , добавил к каждому значению по 2 пункта в плюс и минус. То есть сделал интервал 5 пунктов значений для каждой клавиши.
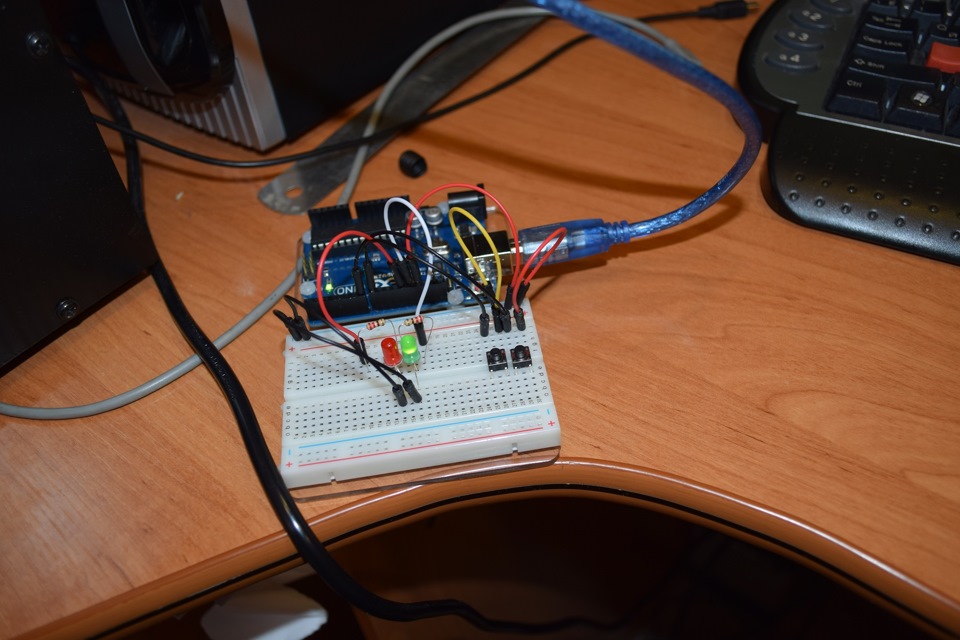
Для каждого действия писал отдельный скетч, тестировал на макетке.
И потом уже заливал в общий скетч нажимая кнопку "проверить" после каждого действия.
И вот готовый скетч. Только чуток доработанный через неделю эксплуатации — увеличил интервал опроса каждой клавиши до 15 пунктов. А то при включении габаритов сопротивление клавиш почему то чуток изменялось и ардуина их переставала "видеть".
Собрал, залил, подключил. И все заработало! С первого раза! Состояние было как у доктора Брауна из "Назад в будущее", когда он сделал "хоть что то что работает"))))
Чувствую что немного перемудрил с кодом управления дверью. Но это был уже готовый скетч на нажатие клавиш (одинарное, двойное, продолжительное) и я не стал в него углубляться и удалять лишнее. Работает и ладно.
USB-кабель приклеил намертво к ардуине термопистолетом и вывел другой конец в бордачок, чтобы не разбирать центральную консоль если придется подправить код.
И видос, как все это работает вживую.
Это мой первый проект на Ардуино. Так что сильно не пинайте если что .
Итак начнем. Вводные данные: машина Toyota Town Ace NOAH 2001 года выпуска (на которой мультируля не было ни в какой комплектации) и мультируль с 16 клавишами и рычагом круиз-контроля от Toyota Prius в 20 кузове.
По поводу инсталляции приусовского руля в свою машину я тут расписывать не буду — слишком много букв и все не по теме данного сообщества ( кому интересно все есть в БЖ). Остановлюсь конкретно на подключении клавиш.
Цель:
1. Подключить клавиши управления магнитолой к магнитоле.
2. При нажатии на "A/C AUTO" — тройное моргание аварийкой (спасибо)
3. Клавиша "TEMP+-" — управление сдвижной дверью. При нажатии дверь движется, при отпускании останавливается, при двойном нажатии движется до конца.
4. Клавиши в нижнем правом кружке дублируют такие же на машине, только клавиша обогрева переднего стекла управляет обогревом зеркал с задержкой отключения 2-3 минуты (подберу в процессе эксплуатации)
5. Клавиша "INFO" — омыватель фар.
6. Клавиша "MAP" — включение, отключение обгонной камеры.
7. При включении обгонной камеры-переключение клавиш управления магнитолой на управление настройками обгонной камеры.
Когда я написал себе этот список, то немного даже пригрустнул. Максимум что я делал на ардуине — это "моргал" светодиодами и крутил шаговик по скачанному скетчу. Не говоря уж об остальной обвязке в виде диодов, оптопар и прочей электронной начинке. Так же пришлось познакомиться со сдвиговым регистром, т.к. своих выходов для моего проекта у ардуины не хватало.
Но в самом начале пришлось поработать паяльником в самом руле.
Нарисовал в layout60 плату.
Сделал её по ЛУТ технологии.
Правда забыл про сопротивления между сдвиговым регистром и оптопарами( пришлось подпаивать к ножкам оптопар), и про предохранители( пришлось резать дорожки и подпаиваться).
Схема. По ссылке можно скачать в лучшем качестве.
Почти все выходы оказались слаботочными и управлялись оптопарами. Реле поставил на обогрев зеркал, на кнопку аварийки, на переключение сигнала между камерой заднего хода и обгонной камерой и на переключение сигнала с кнопок управления магнитолой (на голову или вместо джойстика обгонки). Корпус напечатал на 3d-принтере.
И принялся за саму программу.
Сначала написал скетч по опросу кнопок , добавил к каждому значению по 2 пункта в плюс и минус. То есть сделал интервал 5 пунктов значений для каждой клавиши.
Для каждого действия писал отдельный скетч, тестировал на макетке.
И потом уже заливал в общий скетч нажимая кнопку "проверить" после каждого действия.
И вот готовый скетч. Только чуток доработанный через неделю эксплуатации — увеличил интервал опроса каждой клавиши до 15 пунктов. А то при включении габаритов сопротивление клавиш почему то чуток изменялось и ардуина их переставала "видеть".
Собрал, залил, подключил. И все заработало! С первого раза! Состояние было как у доктора Брауна из "Назад в будущее", когда он сделал "хоть что то что работает"))))
Чувствую что немного перемудрил с кодом управления дверью. Но это был уже готовый скетч на нажатие клавиш (одинарное, двойное, продолжительное) и я не стал в него углубляться и удалять лишнее. Работает и ладно.
USB-кабель приклеил намертво к ардуине термопистолетом и вывел другой конец в бордачок, чтобы не разбирать центральную консоль если придется подправить код.
И видос, как все это работает вживую.
Робот – машинка на Ардуино становятся одним из самым популярных инженерных проектов в школьной робототехнике. Именно с таких устройств, автономных или управляемых со смартфона и bluetooth, начинается путь в робототехнику “после Lego”. К счастью, сегодня можно без труда купить все необходимые компоненты и достаточно быстро создать своего первого робота для езды по линии или объезда препятствий. В этой статье вы найдете подробную видео инструкцию как сделать продвинутый автомобиль Arduino Car своими руками, с питанием, датчиками линии, расстояния и управлении через bluetooth.
Робот на ардуино своими руками
В отличие от других проектов, создание робота – автомобиля (Arduino Car) требует понимания и навыков работы сразу с несколькими важными компонентами, поэтому не стоит приступать к созданию машинок без получения базовых навыков работы с платформой Arduino. В любом случае, вам нужно будет но только подключить готовые модули, но и собрать конструкцию, шасси с двигателями, обеспечить правильное питание и управление. Все это потребует определенного терпения.
 Робот машина на Ардуино
Робот машина на Ардуино
Вот список ключевых компонентов, которые обязательно встретятся в проекте.
Контроллер Ардуино
Куда уж без него, если мы говорим о проектах на этой платформе. Как правило, роботы машины делают на базе плат Arduino Uno и Nano. Mega будут слишком большие, Pro Mini сложнее подключать к компьютеру и соединять с остальными компонентами, а Leonardo требуют дополнительных навыков в программировании, они дороже и их основное преимущество (тесная интеграция с компьютером в качестве периферийного устройства) в данном случае не слишком востребована.
Есть еще вариант использования плат ESP8266 или ESP32, тогда в проекте появляется возможность управления машиной через WiFi. Но и сами платы и их программирование требует определенных навыков, в этой статье мы будем говорить преимущественно об Uno или Nano.
Конструкция, шасси и двигатели робота на Ардуино
Для того, чтобы что-то поехало или стало перемещаться, надо снабдить “это” колесами, гусеницами или манипуляторами-ногами. Вот тут выбор совершенно не ограничен, можно использовать совершенно любые комбинации и сочетания платформ. Как правило, в качестве начального варианта берутся уже готовые наборы платформ с Алиэкспресс.
 Двигатель, шасси и колеса машинки на ардуино
Двигатель, шасси и колеса машинки на ардуино
Если работать со стандартными наборами вам не интересно, можно создать платформу своими руками. Например, разобрать игрушечные радиоуправляемые машинки или любые двигатели на 5-12 вольт, с редукторами или без. Колеса можно создать и самим, что тоже является интересной задачей.
Драйвер двигателей
Ардуино – достаточно ранимое устройство, не терпящее больших нагрузок по току. Соединяя его с “брутальными” мощными двигателями, не избежать беды. Поэтому для нормальной совместной работы нам нужно будет включить в схему робота компонент, отвечающий за управление двигателями – подающий и отключающий ток на их обмотки. Речь идет о микросхеме или готовом модуле, которые называют драйвером двигателя. На нашем сайте есть статьи, посвященные драйверам, построенным на схеме H-моста. Если вы покупаете готовые шасси, то обязательно предусмотрите возможность размещения на них подходящего драйвера.
Красивый корпус
Как правило, вся конструкция автомобиля строится вокруг его шасси. Если посмотреть примеры готовых проектов, то они часто выглядят как “провода на колесиках” – внешний вид их изобилует пучками соединительных проводов, ведущих от восседающего на троне контроллера Ардуино к драйверам, моторам и датчикам. Между тем, красивый и функциональный корпус не только вызывает правильные эстетические чувства и помогает выделить вашу модель от остальных. Хороший корпус может превратить игрушку в реальное устройство, помогает привить навыки конструирования и промышленного дизайна, что важно для инженеров любого возраста.
Питание робота
Обеспечение правильной схемы питания – это то, что очень часто оказывается на последнем месте в списке приоритетов начинающих ардуинщиков. Между тем, именно ошибки в схеме электропитания становятся основными причинами проблем, возникающих в процессе работы умных устройств на Ардуино. Создавая ардуино-машинку нужно предусмотреть питание контроллера, двигателей, драйвера и датчиков. У всех них есть свои ограничения и особенности работы, требуется создать оптимальное по весу и сложности решение, позволяющее учесть все эти ограничения.
 Питание робота на Ардуино
Питание робота на Ардуино
Создавая по-настоящему автономное устройство робота, нужно побеспокоиться и о времени его работы, и о возможности быстрой подзарядки или смены батареек. Как правило, выбираются решения из следующих вариантов:
- Обычные батарейки AA. Тут нужно понимать, что платы Arduino Uno, Nano и большинство двигателей, используемых в Ардуино-робототехнике, требуют напряжения в диапазоне 6-9 вольт. Поэтому придется собрать вместе последовательно не менее 4 батареек на 1,5 В, причем сами батарейки должны быть хорошего качества и обеспечивать работу с достаточно большим током. Например, большинство солевых батареек этим критериям не удовлетворяют. Батарейки AAA при создании ардуино-машинок практически не используются из-за своей пониженной емкости (хотя могут использоваться в миниатюрных моделях, где размер имеет первостепенное значение).
- Аккумулятор AA. Здесь возникает еще большее ограничение по напряжению и току. Большинство аккумуляторов выдают напряжение 1,2 вольт, поэтому их требуется больше для “собирания” нужных нам 6-9 вольт. Несомненным плюсом является возможность перезарядки.
- Литиевые аккумуляторы 18650. Это уже “серьезная артиллерия”, позволяющая получить большое время автономной работы, возможность подзарядки и приемлемые характеристики по току и напряжению. Рабочее напряжение для таких элементов питания – 3,7 В, что позволяет собирать готовую схему питания всего из двух элементов.
- Другие источники питания. Сюда можно включить как более мощные и габаритные никель-металлгидридные, кадмиевые аккумуляторы, так и многочисленные литий-ионные “плоские” варианты, используемые в дронах, смартфонах или другой портативной цифровой технике.
Каким бы ни был источник питания, нужно обеспечить его надежное крепление, удобное расположение, защиту от воздействия недружелюбной окружающей среды. Если вы подключаете к одному источнику и контролер, и двигатели, и датчики, то нужно позаботиться о правильной схеме, включающей, например, надежную связь “по земле” всех устройств.
Где купить платформу и запчасти
Все, о чем говорится в этой статье, можно без проблем купить на всем известном сайте. К сожалению, подавляющее большинство предложений основываются на стандартной платформе 4WD автомобиля с двумя несущими планками, не очень надежными двигателями и колесами, любящими ездить в “развалочку”. Но эти варианты относительно не дороги и вполне подойдут для начала работы.