
Трехфазные асинхронные двигатели нашли самое широкое применение в промышленности и других областях. Современное оборудование просто невозможно представить без этих агрегатов. Одной из важнейших составляющих рабочего цикла машин и механизмов является их плавный пуск и такая же плавная остановка после выполнения поставленной задачи. Такой режим обеспечивается путем использования преобразователей частоты. Эти устройства проявили себя наиболее эффективными в больших электродвигателях, обладающих высокой мощностью.
С помощью преобразователей частоты успешно выполняется регулировка пусковых токов, с возможностью контроля и ограничения их величины до нужных значений. Для правильного использования данной аппаратуры необходимо знать принцип работы частотного преобразователя для асинхронного двигателя. Его применение позволяет существенно увеличить срок службы оборудования и снизить потери электроэнергии. Электронное управление, кроме мягкого пуска, обеспечивает плавную регулировку работы привода в соответствии с установленным соотношением между частотой и напряжением.
- Что такое частотный преобразователь
- Принцип действия частотного преобразователя
- Настройка частотного преобразователя для электродвигателя
- Частотные преобразователи для асинхронных двигателей
- Устройство и принцип работы
- Технические характеристики
- Подключение преобразователя частот – пошаговая инструкция
- Выбор частотного преобразователя
- Обзоры моделей
- Omron MX2
- Vacon NXL
- ESQ 2000
Что такое частотный преобразователь
Основной функцией частотных преобразователей является плавная регулировка скорости вращения асинхронных двигателей. С этой целью на выходе устройства создается трехфазное напряжение с переменной частотой.

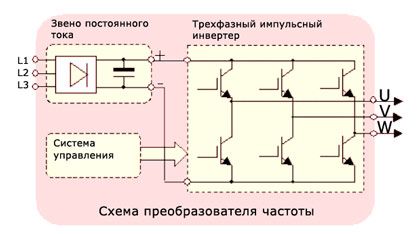
Преобразователи частоты нередко называются инверторами. Их основной принцип действия заключается в выпрямлении переменного напряжения промышленной сети. Для этого применяются выпрямительные диоды, объединенные в общий блок. Фильтрация тока осуществляется конденсаторами с высокой емкостью, которые снижают до минимума пульсации поступающего напряжения. В этом и заключается ответ на вопрос для чего нужен частотный преобразователь.
В некоторых случаях в схему может быть включена так называемая цепь слива энергии, состоящая из транзистора и резистора с большой мощностью рассеивания. Данная схема применяется в режиме торможения, чтобы погасить напряжение, генерируемое электродвигателем. Таким образом, предотвращается перезарядка конденсаторов и преждевременный выход их из строя. В результате использования частотников, асинхронные двигатели успешно заменяют электроприводы постоянного тока, имеющие серьезные недостатки. Несмотря на простоту регулировки, они считаются ненадежными и дорогими в эксплуатации. В процессе работы постоянно искрят щетки, а электроэрозия приводит к износу коллектора. Двигатели постоянного тока совершенно не подходят для взрывоопасной и запыленной среды.
В отличие от них, асинхронные двигатели значительно проще по своему устройству и надежнее, благодаря отсутствию подвижных контактов. Они более компактные и дешевые в эксплуатации. К основному недостатку можно отнести сложную регулировку скорости вращения традиционными способами. Для этого было необходимо изменять питающее напряжение и вводить дополнительные сопротивления в цепь обмоток. Кроме того, применялись и другие способы, которые на практике оказывались неэкономичными и не обеспечивали качественной регулировки скорости. Но, после того как появился преобразователь частоты для асинхронного двигателя, позволяющий плавно регулировать скорость в широком диапазоне, все проблемы разрешились.
Одновременно с частотой изменяется и подводимое напряжение, что позволяет увеличить КПД и коэффициент мощности электродвигателя. Все это позволяет получить высокие энергетические показатели асинхронных двигателей, продлить срок их эксплуатации.
Принцип действия частотного преобразователя
Эффективное и качественное управление асинхронными электродвигателями стало возможно за счет использования совместно с ними частотных преобразователей. Общая конструкция представляет собой частотно-регулируемый привод, который позволил существенно улучшить технические характеристики машин и механизмов.
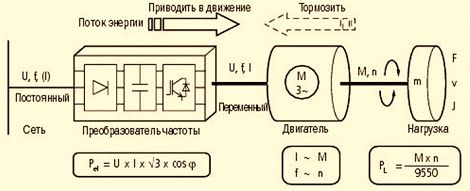
В качестве управляющего элемента данной системы выступает преобразователь частоты, основной функцией которого является изменение частоты питающего напряжения. Его конструкция выполнена в виде статического электронного узла, а формирование переменного напряжения с заданной изменяемой частотой осуществляется на выходных клеммах. Таким образом, за счет изменения амплитуды напряжения и частоты регулируется скорость вращения электродвигателя.
Управление асинхронными двигателями осуществляется двумя способами:
- Скалярное управление действует в соответствии с линейным законом, согласно которому амплитуда и частота находятся в пропорциональной зависимости между собой. Изменяющаяся частота приводит к изменениям амплитуды поступающего напряжения, оказывая влияние на уровень крутящего момента, коэффициент полезного действия и коэффициент мощности агрегата. Следует учитывать зависимость выходной частоты и питающего напряжения от момента нагрузки на валу двигателя. Для того чтобы момент нагрузки был всегда равномерным, отношение амплитуды напряжения к выходной частоте должно быть постоянным. Данное равновесие как раз и поддерживается частотным преобразователем.
- Векторное управление удерживает момент нагрузки в постоянном виде во всем диапазоне частотных регулировок. Повышается точность управления, электропривод более гибко реагирует на изменяющуюся выходную нагрузку. В результате, момент вращения двигателя находится под непосредственным управлением преобразователя. Нужно учитывать, что момент вращения образуется в зависимости от тока статора, а точнее – от создаваемого им магнитного поля. Под векторным управлением фаза статорного тока изменяется. Эта фаза и есть вектор тока осуществляющий непосредственное управление моментом вращения.
Настройка частотного преобразователя для электродвигателя
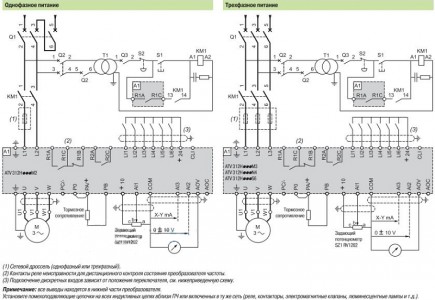
Для того чтобы преобразователь частоты для асинхронного двигателя в полном объеме выполнял свои функции, его необходимо правильно подключить и настроить. В самом начале подключения в сети перед прибором размещается автоматический выключатель. Его номинал должен совпадать с величиной тока, потребляемого двигателем. Если частотник предполагается эксплуатировать в трехфазной сети, то автомат также должен быть трехфазным, с общим рычагом. В этом случае при коротком замыкании на одной из фаз можно оперативно отключить и другие фазы.
Ток срабатывания должен обладать характеристиками, полностью соответствующими току отдельной фазы электродвигателя. Если частотный преобразователь планируется использовать в однофазной сети, в этом случае рекомендуется воспользоваться одинарным автоматом, номинал которого должен в три раза превышать ток одной фазы. Независимо от количества фаз, при установке частотника, автоматы не должны включаться в разрыв заземляющего или нулевого провода. Рекомендуется использовать только прямое подключение.
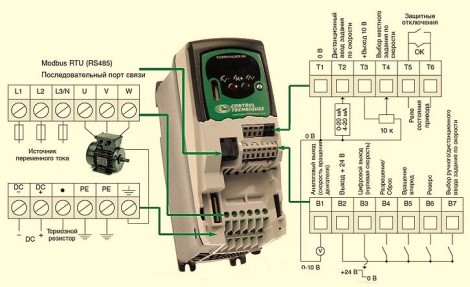
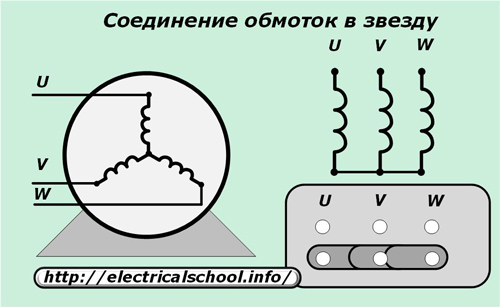
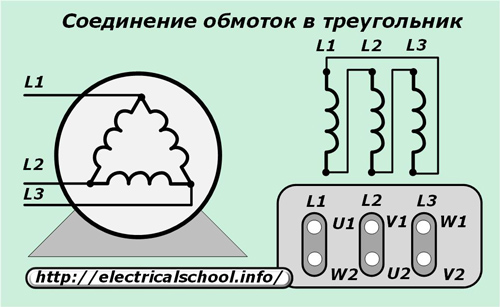
При правильной настройке и подключении частотного преобразователя, его фазные провода должны соединяться с соответствующими контактами электродвигателя. Предварительно обмотки в двигателе соединяются по схеме «звезда» или «треугольник», в зависимости от напряжения, выдаваемого преобразователем. Если оно совпадает с меньшим значением, указанным на корпусе двигателя, то применяется соединение треугольником. При более высоком значении используется схема «звезда».
Далее выполняется подключение частотного преобразователя к контроллеру и пульту управления, который входит в комплект поставки. Все соединения осуществляются в соответствии со схемой, приведенной в руководстве по эксплуатации. Рукоятка должна находиться в нейтральном положении, после чего включается автомат. Нормальное включение подтверждается световым индикатором, загорающимся на пульте. Для того чтобы преобразователь заработал, нажимается кнопка RUN, запрограммированная по умолчанию.
После незначительного поворота рукоятки, двигатель начинает постепенно вращаться. Для переключения вращения в обратную сторону, существует специальная кнопка реверса. Затем с помощью рукоятки настраивается нужная частота вращения. На некоторых пультах вместо частоты вращения электродвигателя, отображаются данные о частоте напряжения. Поэтому рекомендуется заранее внимательно изучить интерфейс установленной аппаратуры.
Частотные преобразователи для асинхронных двигателей
Благодаря частотным преобразователям, работа современных асинхронных двигателей отличается высокой эффективностью, устойчивостью и безопасностью. Это особенно важно, поскольку каждый электродвигатель отличается индивидуальными особенностями режима работы. Поэтому оптимизации параметров питания агрегатов с использованием преобразователей частоты придается большое значение. Когда частотный преобразователь выбирается для каких-либо конкретных целей, в этом случае должны обязательно учитываться его рабочие параметры.

Нормальная работа устройства будет зависеть от типа электродвигателя, его мощности, диапазона, скорости и точности регулировок, а также от поддержания стабильного момента вращения вала. Эти показатели имеют первостепенное значение и должны органично сочетаться с габаритами и формой аппарата. Следует обратить особое внимание на то, как расположены элементы управления и будет ли удобно им пользоваться.
Выбирая устройство, необходимо заранее знать, в каких условиях оно будет эксплуатироваться. Если сеть однофазная, то и преобразователь должен быть таким же. То же самое касается и трехфазных аппаратов. Многое зависит от мощности асинхронных двигателей. Если при запуске на валу необходим высокий пусковой момент, то и частотный преобразователь должен быть рассчитан на большее значение тока.
 Ротор любого электродвигателя приводится в движение под действием сил, вызванных вращающимся электромагнитным полем внутри обмотки статора. Скорость его оборотов обычно определяется промышленной частотой электрической сети.
Ротор любого электродвигателя приводится в движение под действием сил, вызванных вращающимся электромагнитным полем внутри обмотки статора. Скорость его оборотов обычно определяется промышленной частотой электрической сети.
Ее стандартная величина в 50 герц подразумевает совершение пятидесяти периодов колебаний в течение одной секунды. За одну минуту их число возрастает в 60 раз и составляет 50х60=3000 оборотов. Такое же число раз проворачивается ротор под воздействием приложенного электромагнитного поля.
Если изменять величину частоты сети, приложенной к статору, то можно регулировать скорость вращения ротора и подключенного к нему привода. Этот принцип заложен в основу управления электродвигателями.
Виды частотных преобразователей
По конструкции частотные преобразователи бывают:
1. индукционного типа;
Асинхронные электродвигатели, выполненные по схеме с фазным ротором и запущенные в режим генератора, являются представителями первого вида. Они при работе обладают низким КПД и отмечаются маленькой эффективностью. Поэтому они не нашли широкого применения в производстве и используются крайне редко.
Способ электронного преобразования частоты позволяет плавно регулировать обороты как асинхронных, так и синхронных машин. При этом может быть реализован один из двух принципов управления:
1. по заранее заданной характеристике зависимости скорости вращения от частоты (V/f);
2. метод векторного управления.
Первый способ является наиболее простым и менее совершенным, а второй используется для точного регулирования скоростей вращения ответственного промышленного оборудования.
Особенности векторного управления частотным преобразованием
Отличием этого способа является взаимодействие, влияние устройства управления преобразователя на «пространственный вектор» магнитного потока, вращающийся с частотой поля ротора.
Алгоритмы для работы преобразователей по этому принципу создаются двумя способами:
1. бессенсорного управления;
Первый метод основан на назначении определенной зависимости чередования последовательностей широтно-импульсной модуляции (ШИМ) инвертора для заранее подготовленных алгоритмов. При этом амплитуда и частота напряжения на выходе преобразователя регулируются по скольжению и нагрузочному току, но без использования обратных связей по скорости вращения ротора.
Этим способом пользуются при управлении несколькими электродвигателями, подключенными параллельно к преобразователю частоты. Потокорегулирование подразумевает контроль рабочих токов внутри двигателя с разложением их на активную и реактивную составляющие и внесение корректив в работу преобразователя для выставления амплитуды, частоты и угла для векторов выходного напряжения.
Это позволяет повысить точность работы двигателя и увеличить границы его регулирования. Применение потокорегулирования расширяет возможности приводов, работающих на малых оборотах с большими динамическими нагрузками, такими как подъемные крановые устройства или намоточные промышленные станки.
Использование векторной технологии позволяет применять динамическую регулировку вращающихся моментов к трехфазным асинхронным двигателям.
Принципиальную упрощенную электрическую схему асинхронного двигателя можно представить следующим видом.
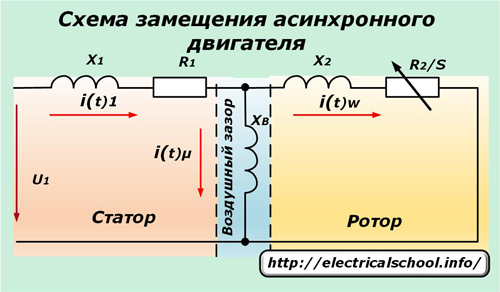
На обмотки статора, обладающие активным R1 и индуктивным X1 сопротивлениями, приложено напряжение u1. Оно, преодолевая сопротивление воздушного зазора Хв, трансформируется в обмотку ротора, вызывая в ней ток, который преодолевает ее сопротивление.
Векторная диаграмма схемы замещения
Ее построение помогает понять происходящие процессы внутри асинхронного двигателя.
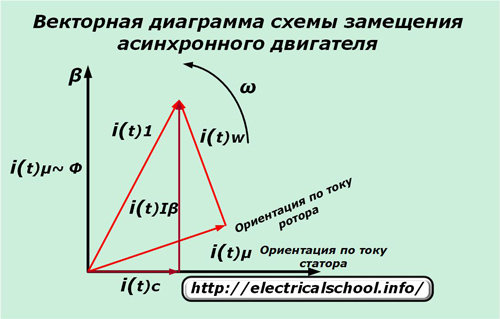
Энергия тока статора разделяется на две части:
iµ — потокообразующую долю;
iw — моментообразующую составляющую.
При этом ротор обладает активным сопротивлением R2/s, зависящим от скольжения.
Для бессенсорного управления измеряются:
По их значениям рассчитывают:
iµ — потокообразующую составляющую тока;
iw — моментообразующую величину.
В алгоритм расчета уже заложили электронную эквивалентную схему асинхронного двигателя с регуляторами тока, в которой учтены условия насыщения электромагнитного поля и потерь магнитной энергии в стали.
Обе этих составляющих векторов тока, отличающиеся по углу и амплитуде, вращаются совместно с системой координат ротора и пересчитываются в стационарную систему ориентации по статору.
По этому принципу подстраиваются параметры частотного преобразователя под нагрузку асинхронного двигателя.
Принцип работы частотного преобразователя
В основу этого устройства, которое еще называют инвертором, заложено двойное изменение формы сигнала питающей электрической сети.
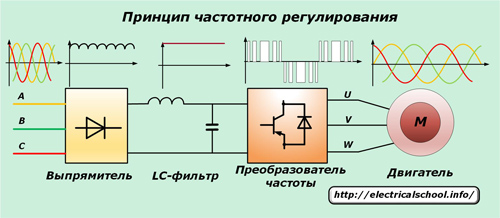
Вначале промышленное напряжение подается на силовой выпрямительный блок с мощными диодами, которые убирают синусоидальные гармоники, но оставляют пульсации сигнала. Для их ликвидации предусмотрена батарея конденсаторов с индуктивностью (LC-фильтр), обеспечивающая стабильную, сглаженную форму выпрямленному напряжению.
Затем сигнал поступает на вход преобразователя частоты, который представляет собой мостовую трехфазную схему из шести силовых транзисторов серии IGBT или MOSFET с диодами защиты от пробоя напряжений обратной полярности. Используемые ранее для этих целей тиристоры не обладают достаточным быстродействием и работают с большими помехами.
Для включения режима «торможения» двигателя в схему может быть установлен управляемый транзистор с мощным резистором, рассеивающим энергию. Такой прием позволяет убирать генерируемое двигателем напряжение для защиты конденсаторов фильтра от перезарядки и выхода из строя.
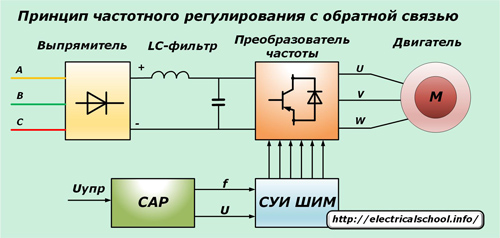
Способ векторного управления частотой преобразователя позволяет создавать схемы, осуществляющие автоматическое регулирование сигнала системами САР. Для этого используется система управления:
2. ШИМ (широтного импульсного моделирования).
Метод амплитудного регулирования основан на изменении входного напряжения, а ШИМ — алгоритма переключений силовых транзисторов при неизменном напряжении входа.
При ШИМ регулировании создается период модуляции сигнала, когда обмотка статора подключается по строгой очередности к положительным и отрицательным выводам выпрямителя.
Поскольку частота такта генератора довольно высокая, то в обмотке электродвигателя, обладающего индуктивным сопротивлением, происходит их сглаживание до синусоиды нормального вида.
![]()
Способы ШИМ управления позволяют максимально исключить потери энергии и обеспечивают высокий КПД преобразования за счет одновременного управления частотой и амплитудой. Они стали доступны благодаря развитию технологий управления силовыми запираемыми тиристорами серии GTO или биполярных марок транзисторов IGBT, обладающих изолированным затвором.
Принципы их включения для управления трехфазным двигателем показаны на картинке.
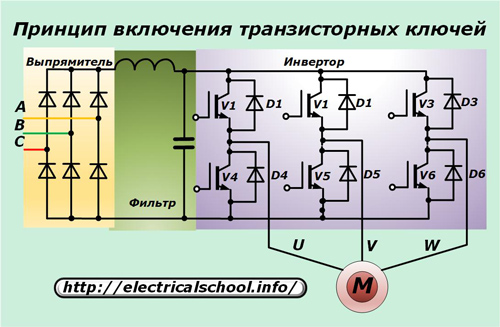
Каждый из шести IGBT-транзисторов подключается по встречно-параллельной схеме к своему диоду обратного тока. При этом через силовую цепь каждого транзистора проходит активный ток асинхронного двигателя, а его реактивная составляющая направляется через диоды.
Для ликвидации влияния внешних электрических помех на работу инвертора и двигателя в конструкцию схемы преобразователя частоты может включаться помехозащитный фильтр, ликвидирующий:
наводимые работающим оборудованием электрические разряды.
Их возникновение сигнализирует контроллер, а для уменьшения воздействия используется экранированная проводка между двигателем и выходными клеммами инвертора.
С целью улучшения точности работы асинхронных двигателей в схему управления частотных преобразователей включают:
ввода связи с расширенными возможностями интерфейса;
информационный Led-дисплей, отображающий основные выходные параметры;
тормозной прерыватель и встроенный ЭМС фильтр;
систему охлаждения схемы, основанную на обдуве вентиляторами повышенного ресурса;
функцию прогрева двигателя посредством постоянного тока и некоторые другие возможности.
Эксплуатационные схемы подключения
Частотные преобразователи создаются для работы с однофазными или трехфазными сетями. Однако, если есть промышленные источники постоянного тока с напряжением 220 вольт, то от них тоже можно запитывать инверторы.

Трехфазные модели рассчитываются на напряжение сети 380 вольт и выдают его на электродвигатель. Однофазные же инверторы питаются от 220 вольт и на выходе выдают три разнесенных по времени фазы.
Схема подключения частотного преобразователя к двигателю может быть выполнена по схемам:
Обмотки двигателя собираются в «звезду» для преобразователя, запитанного от трехфазной сети 380 вольт.
По схеме «треугольник» собирают обмотки двигателя, когда питающий его преобразователь подключен к однофазной сети 220 вольт.
Выбирая способ подключения электрического двигателя к преобразователю частоты надо обращать внимание на соотношение мощностей, которые может создать работающий двигатель на всех режимах, включая медленный, нагруженный запуск, с возможностями инвертора.
Нельзя постоянно перегружать частотный преобразователь, а небольшой запас его выходной мощности обеспечит ему длительную и безаварийную работу.
Двигатель асинхронного типа используется повсеместно. Основное предназначение – преобразование электричества в механическую силу. Электродвигатель – своего рода противоположность генератора.

Учитывая особенность того, что рассматриваемый механизм работает от электричества, особые требования предъявляются к показателям электроэнергии. Часто можно встретить ситуацию, когда в цепи присутствует частотный преобразователь, который создан специально для асинхронного типа двигателя.
В системе питания, созданной для асинхронного двигателя, рассматриваемый аппарат служит для изменения тока с 1 или 3 фазами, который приходит от сети питания и имеет частоту 50 Гц, в трехфазный ток, показатель частоты от различных условий может быть от 1 до 800 Гц.
Кроме вышеприведенной информации, стоит уточнить следующее:
- Для оборудования, которое используется в промышленности, проводят выпуск частотного преобразователя, имеющий электроиндукционный тип. Они представляют собой в некотором роде асинхронный двигатель, который имеет фазный ротор. Определенный режим позволяет работать оборудованию в режиме генератора-преобразователя.
- Изменение частоты входного тока используются для изменения скорости вращения выходного вала двигателя. Совершенные механизмы регулирования представлены векторным типом, практически только подобные варианты исполнения присутствуют в продаже.
Приобрести также можно варианты исполнения для бытового использования.
Устройство и принцип работы

Рассматриваемое устройство состоит из следующих элементов:
- Мост постоянного тока выступает в качестве выпрямителя. Именно он проводит преобразование, к примеру, промышленного тока с генератора в постоянный.
- Инвертор проводит создание переменного тока. При этом, есть возможность контролировать частоту и амплитуду.
- Также, в конструкции есть тиристоры или транзисторы, которые обеспечивают подачу рабочего тока к электродвигателю. Они выступают в качестве электрических ключей.
- В управляющей части установлен микропроцессор, который проводит управление работой установленных ключей. Также, микропроцессор выполняет ряд других задач: проводит защиту системы, контролирует выходные параметры, диагностирует состояние подаваемого тока.
Многие построены на основе двойного преобразования.
Можно выделить 2 основных класса:
- С созданием промежуточного звена.
- С образованием непосредственной связи.
2 вышеприведенных класса имеют свои особенности, которые определяют возможность и целесообразность их использования тех или в иных условиях.
Непосредственная связь обуславливается тем, что преобразователь представлен выпрямителем управляемого типа. Используемая система управления проводит отпирание группы тиристоров и также проводит подвод напряжения к обмотке электродвигателя.
В данном случае, напряжение преобразуется путем вырезания синусоид из входного тока. Проведенные измерения показывают, что получаемая частота находится в приблизительном промежутке от 0 до 30 Гц. Использовать подобный вариант исполнения нельзя в регулируемых приводах.

При выходе синусоида с непосредственной связью, приводит к следующему:
- Появляется гармоник.
- Происходят потери в самом электродвигателе.
- Происходит перегрев электродвигателя.
- Значительно снижается показатель момента.
- Создаются сильные помехи.
Кроме этого, компенсаторы значительно повышают стоимость цепи, ее габариты и вес. Включение дополнительного элемента в цепь также приводит к уменьшению показателя КПД из-за возникающих потерь.
Современные цепи питания часто создаются при использовании преобразователя, который имеет промежуточное звено.
В данном случае, проводится процедура, предусматривающая двойное преобразование электрического тока:
- Изначально, входное напряжение синусоидального типа с неизменной частотой и амплитудой преобразуется при помощи выпрямителя.
- Используютсяспециальные фильтры, которые сглаживают показатели.
- Инвертор на выходе проводит преобразование энергии с изменяемым показателем амплитуды и частоты.
Как правило, процедура двойного преобразования приводит к значительному снижению показателя КПД, вследствие чего также ухудшаются показатели соотношения массы и габаритов.
К основным достоинствам преобразователей частоты, которые работают как тиристор, можно отнести следующее:
- Возможна работа в системе с большими показателями тока.
- Система может быть использована при высоких показателях напряжения.
- Есть устойчивость к длительному воздействию большой нагрузки и импульсного воздействия.
- Более высокий показатель КПД, который достигает 98%.
Данные особенности являются основными отличительными признаками работы двух типов преобразователей.
Технические характеристики
 Использовать частотные преобразователи следует только с учетом эксплуатационных характеристик. К основным техническим характеристикам, на которые нужно обратить внимание, можно отнести:
Использовать частотные преобразователи следует только с учетом эксплуатационных характеристик. К основным техническим характеристикам, на которые нужно обратить внимание, можно отнести:
- Диапазон напряжения подаваемого тока. Существуют различные варианты исполнения, которые могут работать при напряжении от 100 до 120 В, от 200 до 240 В. Этот показатель является определяющим при выборе наиболее подходящей модели.
- Номинальная мощность подключаемого в цепи электродвигателя. Как правило, показатель измеряется в кВт.
- Полная мощность электродвигателя.
- Номинальный выходной ток.
- Выходное напряжение зачастую не больше показателя напряжения от источника питания, но может быть и меньше.
- Диапазон выходной частоты.
- Показатель допустимой силы тока на входе.
- Частота электричества при входе.
- Максимальные отклонения от показателей, которые допустимы при тех или иных случаях.
Подобные параметры должны быть указаны в спецификации преобразователя частот. Если, к примеру, не учесть напряжение подаваемого тока, рассматриваемое устройство будет испорчено.
Подключение преобразователя частот – пошаговая инструкция

Провести подключение преобразователя частоты можно различными схемами. Все зависит от того, с какой целью рассматриваемый элемент включается в сеть, к примеру, для более легкого старта или регулировки частоты вращения.
Довольно простой схемой подключения частотника можно назвать размещение устройства автоматического выключения перед ним. Подобное устройство должно быть адоптировано для работы с током, величина его должна составлять величину номинального показателя потребляемого тока электродвигателя.
Стоит отметить, что многие модели частотников могут работать с трехфазной сетью, поэтому можно выбрать обычный трехфазный автомат. На момент возникновения короткого замыкания, одна из фаз проводит обесточивание других. Если же преобразователь частоты рассчитан на однофазную сеть, стоит выбрать выключатель, который рассчитан на утроенный ток одной фазы.
Частотники рассчитаны исключительно на прямое включение в сеть.
Дальнейшая работа по подключению заключается в присоединении фазных проводов к определенным клеммам электродвигателя. Также, проводится включение внешнего тормозного резистора в цепь. Кроме этого, в сеть можно включить вольтметр для измерения напряжения в цепи на выходе после преобразователя.
Выбор частотного преобразователя

Изначальной задачей каждого производителя можно назвать продать свою продукцию. Именно поэтому, следует обратить внимание на нижеприведенные нюансы правильного выбора:
- Скалярный или векторный метод управления. Современные варианты исполнения зачастую имеют векторные методы управления, однако особый режим работы позволяет переключиться на скалярный метод управления. Найти новый частотник без векторного метода управления практически невозможно.
- Мощностной ряд. Стоит помнить о том, что мощность потребителя энергии – важный показатель, на который стоит обращать внимание.
- Входное напряжение, а точнее допустимый диапазон, определяет то, при каком напряжении преобразователь частоты может работать без сбоев. При этом, важно понять, что падение показателя приведет к остановке частотника, увеличение – к выходу из строя всего оборудования. Поэтому следует обеспечить работу при постоянном показателе входного напряжения.
- Диапазон регулировки – также важный показатель, особенно при использовании двигателей, которые работают при высоких показателях номинальной частоты.
- Как организовано управление. Современные варианты исполнения имеют специальные пульты, при помощи которых можно вводить необходимые значения.
- Срок гарантии косвенно говорит о надежности техники. Однако, стоит помнить о том, что выход из строя при подаче тока с неправильными номинальными показателями нельзя назвать гарантийным случаем.
Вышеприведенные особенности следует учитывать при выборе преобразователя частоты.
Обзоры моделей
Выделим следующие модели рассматриваемого оборудования:
Omron MX2

Стоимость этой модели составляет 15 000 рублей. Значение мощности 0,75 кВт, выходного тока 2,1 А. Вес подобного блока составляет 1,5 кг. Блок компактный и прост в использовании. Данный вариант исполнения имеет встроенный блок управления.
Vacon NXL

Стоимость около 24 000 рублей. Значение мощности 1,1 кВт, выходного тока 3,3. Вес блока составляет 5 кг. Довольно дорогая модель, несмотря на небольшое повышение выходных показателей.
ESQ 2000

Мощный блок, который может работать при 90 кВт. Стоимость около 250 000 рублей. Выходной ток 176 А. Установка имеет вес 50 кг. Рассматриваемая установка одна из самых дорогих. Имеет довольно большие габаритные размеры, несколько напоминает шкаф.
Существует огромное количество моделей, их стоимость зачастую зависит от эксплуатационных характеристик.