
Рассмотрим другой вид КУ — синхронные двигатели.
Из курса "Электрические машины" известно, что при увеличении тока возбуждения выше номинального значения синхронные двигатели (СД) могут вырабатывать реактивную мощность, следовательно, их можно использовать как средство компенсации реактивной мощности. Главным отличием СД от АД является то, что магнитное поле, необходимое для действия СД, создаётся в основном от отдельного источника постоянного тока (возбудителя). Вследствие этого СД в нормальном режиме (при ) почти не потребляет из сети реактивной мощности, необходимой для создания главного магнитного потока, а в режиме перевозбуждения, т.е. при работе с опережающим коэффициентом мощности, может генерировать ёмкостную мощность в сеть.
Синхронные двигатели, выпускаемые отечественной промышленностью, рассчитаны на опережающий коэффициент мощности и при номинальной активной нагрузке и напряжении могут вырабатывать номинальную реактивную мощность:
При недогрузке СД по активной мощности 1.
Средние значения коэффициента нагрузки по реактивной мощности в зависимости от изменения активной нагрузки и напряжения сети для СД некоторых серий напряжением 6 10 кВ приведены в таблице 2.
Таблица 2. Зависимости коэффициента перегрузки по реактивной мощности синхронных двигателей от напряжения
Серия, номинальное напряжение и частота вращения двигателя
Относительное напряжение на зажимах двигателя
Коэффициент перегрузки по реактивной мощности при коэффициенте загрузки
СДН, 6 и 10 кВ (для всех частот вращения)
- 600-1000 об/мин
- 370-500 об/мин
- 187-300 об/мин
- 100-167 об/мин
СТД, 6 и 10 кВ,3000 об/мин
СД и СДЗ, 380 В (для всех частот вращения)
- 0,95
- 1
- 1,05
- 1,1
- 1,1
- 1,1
- 1,1
- 1,1
- 1,1
- 0,95
- 1,0
- 1,05
- 1,1
- 0,95
- 1,0
- 1,05
- 1,1
- 1,31
- 1,21
- 1,06
- 0,89
- 0,88
- 0,86
- 0,81
- 0,9
- 0,86
- 1,3
- 1,32
- 1,12
- 0,9
- 1,16
- 1,15
- 1,1
- 0,9
- 1,39
- 1,27
- 1,12
- 0,94
- 0,92
- 0,88
- 0,85
- 0,98
- 0,9
- 1,42
- 1,34
- 1,23
- 1,08
- 1,26
- 1,24
- 1,18
- 1,06
- 1,45
- 1,33
- 1,17
- 0,96
- 0,94
- 0,9
- 0,87
- 1
- 0,92
- 1,52
- 1,43
- 1,31
- 1,16
- 1,36
- 1,32
- 1,25
- 1,15
Преимуществом СД, используемым для компенсации реактивной мощности, по сравнению с КБ является возможность плавного регулирования генерируемой реактивной мощности.
Недостатком является то, что активные потери на генерирование реактивной мощности для СД больше, чем для КБ, так как зависят от квадрата генерируемой мощности СД.
Дополнительные активные потери в обмотке СД, кВт, вызываемые генерируемой реактивной мощностью в пределах изменения от 1 до 0,9 при номинальной активной мощности СД, равной ,
где -номинальная реактивная мощность СД, квар; r -сопротивление одной фазы обмотки СД в нагретом состоянии, Ом; -номинальное напряжение сети, кВ.
В общем случае когда , , и отличаются от номинальных значений, потери активной мощности, кВт, на генерирование реактивной мощности

где -величина генерируемой синхронным двигателем реактивной мощности, квар; и -постоянные величины (таблица 3) кВт.
Таблица 3. Основные технические данные некоторых синхронных двигателей на напряжение 6 кВ при cos = 0,9
Работа системы электроснабжения характеризуется потреблением электроприемниками реактивной мощности. Это вызывает дополнительные потери энергии в элементах системы, снижение уровня напряжения и необходимость иметь повышенную пропускную способность подстанций и распределительных сетей, что снижает экономичность работы системы. В связи с этим для улучшения показателей работы системы электроснабжения необходимо производить компенсацию реактивной мощности, что может осуществляться несколькими способами.
Один из эффективных способов компенсации реактивной мощности связан с использованием СД, который за счет регулирования тока возбуждения может осуществлять генерацию реактивной мощности в электрическую сеть. В этом случае СД работает с опережающим cos. Возможность работы СД в качестве компенсатора реактивной мощности иллюстрируют U-образные характеристики СД, приведенные на рис. 5.5. Эти характеристики показывают зависимости тока статораI1и егоcosот тока возбужденияIвприU=constиP=const.
Характеристики I1(Iв) показывают, что при увеличении от нуля тока возбуждения ток статора вначале уменьшается, что происходит за счет уменьшения его реактивной составляющей. При некотором токе возбуждения она становится равной нулю,acos=l. При дальнейшем увеличении тока возбуждения вновь появляется и увеличивается реактивная составляющая тока статора, но уже с опережающей фазой. Синхронный двигатель начинает работать генератором реактивной энергии с отдачей ее в сеть.
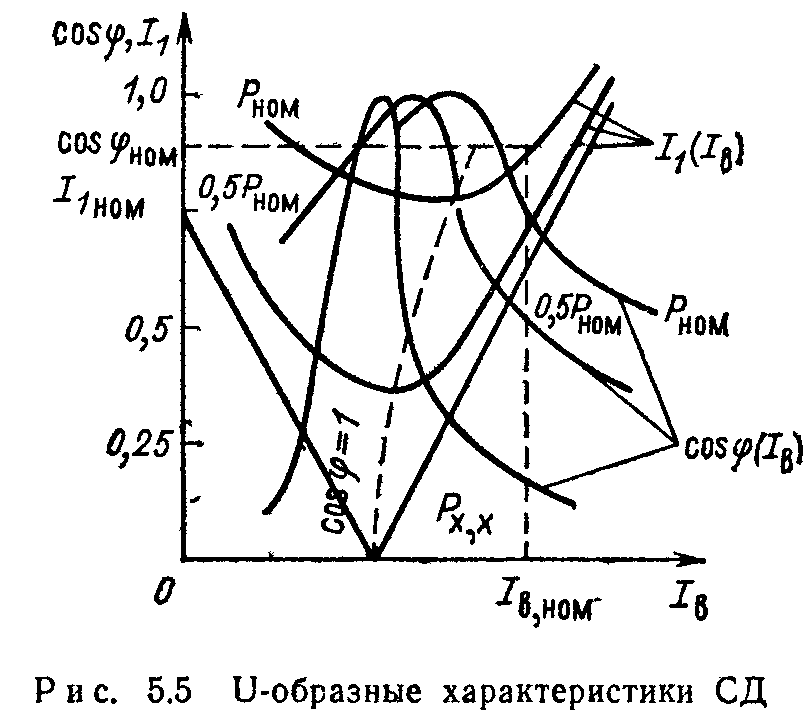
Характеристики рис. 5.5 позволяют выявить также зависимость компенсирующей способности СД от мощности Рна его валу. Как видно из рис. 5.5, с ростом мощностиРобласть генерации реактивной мощности (опережающегоcos) смещается в сторону больших токов возбуждения. Другими словами, при неизменном токе возбуждения с изменением мощности на валу отдаваемая в сеть реактивная мощность также меняется.
Из сказанного следует важный вывод: если СД работает с переменной нагрузкой на валу, то для полного использования его компенсирующих свойств требуется регулирование тока возбуждения.
Следует подчеркнуть, что при использовании СД в качестве источника реактивной мощности необходимо обеспечивать повышенные токи возбуждения и увеличивать габаритную (полную) мощность СД, что не является ограничивающим фактором для такого применения СД. Покажем это следующим несложным расчетом.
Запишем отношение полной габаритной мощности Sк активной мощностиP
 (5.8)
(5.8)
Пусть требуется, например, чтобы реактивная опережающая мощность составляла 40 % активной мощности, т. е. Q/P=0,4. Расчет по формуле (5.8) выявляет, что при этом отношениеS/Pсоставит 1,08, т. е. генерирование указанной реактивной мощности потребует увеличения габаритной мощности только на 8 %. Это показывает, что использование СД для компенсации реактивной мощности является выгодным.
Отдаваемая (или потребляемая при недовозбуждении) реактивная мощность СД определяется общей формулой
 (5.9)
(5.9)
Более удобные для практических расчетов выражения можно получить с помощью векторных диаграмм СД. Для явнополюсного СД может быть получено следующее выражение, вывод которого дан в [6]:
 (5.10)
(5.10)
где xdиxq– индуктивные сопротивления СД соответственно по продольной и поперечной осям.
Формулу для неявнополюсного СД можно получить из выражения (5.10), если положить в нем xd=xq=x1,
 (5.11)
(5.11)
Полученные формулы подтверждают выводы, сделанные на основании анализа характеристик рис. 5.5, а именно: с увеличением тока возбуждения и тем самым ЭДС Ерастет генерируемая СД реактивная мощность, значение которой при этом зависит от нагрузки СД, определяющей угол.
При использовании СД для компенсации реактивной мощности сети энергоснабжения обычно требуется рассматривать в комплексе несколько вопросов. Одним из основных вопросов является технико-экономическое обоснование использования данного способа компенсации реактивной энергии. Как известно, кроме СД для этой цели могут использоваться также статические компенсирующие устройства (конденсаторы) и синхронные компенсаторы. Среди приемлемых вариантов экономически целесообразным будет тот, который обеспечивает минимум приведенных годовых затрат,

где Kн,э– нормативный коэффициент эффективности капитальных вложенийK;Сэ– эксплуатационные расходы.
Приведенные затраты, связанные с установкой средств компенсации реактивной мощности, ее генерированием и передачей, определяются [29] по формуле
 (5.12)
(5.12)
где Q– реактивная мощность, генерируемая источником, Мвар;З0– постоянная составляющая затрат, не зависящая от генерируемой реактивной мощности, руб.;Зy1– удельные затраты на 1 Мвар реактивной мощности, руб/Мвар;Зy1– удельные затраты на 1 Мвар 2 генерируемой мощности, руб/Мвар 2 .
Формулы для нахождения З0,Зy1иЗy2для разных видов компенсирующих устройств, а также пример технико-экономического расчета даны в [29]. Выбор мощности компенсирующего устройстваQтакже должен быть обоснован и может быть выполнен с помощью полученных в [29] выражений.
Если в результате выполненных технико-экономических расчетов выявлена целесообразность использования СД для компенсации определенной реактивной мощности Q, то далее необходимо установить наиболее экономическое ее распределение между отдельными СД. Это достигается отысканием оптимального варианта возбуждения СД, участвующих в компенсации. Под оптимальным вариантом возбуждения СД обычно понимают такое распределение реактивной мощностиQмежду отдельными СД, при котором суммарные потери активной мощности, зависящие от выработки и распределения реактивной мощности, минимальны. В [6] для этого случая получены расчетные формулы и рассмотрены примеры их использования.
На практике распределение реактивной мощности между СД часто производят пропорционально либо их полной номинальной мощности Sном, либо пропорционально их активной мощностиРном. Этот принцип, как показывают расчеты, дает потери активной мощности, близкие к минимальному значению.
Токи возбуждения отдельных СД, компенсирующих заданную для них реактивную мощность, могут быть определены по формулам [6] либо по кривым Q(Iв), снятым опытным путем.
Синхронный компенсатор – синхронный двигатель не выполняющий механической работы. Его назначение — компенсация реактивной мощности. Если нагрузить его механической работой, он не сможет компенсировать реактивную составляющую в нужном диапазоне.
У него два режима работы:
Не будем углубляться в теорию работы синхронных машин, а рассмотрим отдельно каждый из режимов работы синхронного компенсатора.

Перевозбужденный режим. Так как компенсатор работает на холостом ходу, то согласно теории ток идеального холостого хода должен быть равен нулю, хотя на самом деле это не так. Выполняется равенство  . Если увеличить ток возбуждения (Iв) больше нуля Iв ≠ 0, то в двигателе образуется ЭДС и соответственно
. Если увеличить ток возбуждения (Iв) больше нуля Iв ≠ 0, то в двигателе образуется ЭДС и соответственно  — машина выходит из электрического равновесия и возникает ток
— машина выходит из электрического равновесия и возникает ток  , который будет отставать от ∆
, который будет отставать от ∆  ,
, , на 90 0 . Соответственно в сеть будет отдаваться реактивная составляющая. На рисунке а) приведена векторная диаграмма для данного случая.
, на 90 0 . Соответственно в сеть будет отдаваться реактивная составляющая. На рисунке а) приведена векторная диаграмма для данного случая.
 Рис. а) векторная диаграмма работы в перевозбужденном режиме
Рис. а) векторная диаграмма работы в перевозбужденном режиме
Недовозбужденный режим. Если уменьшить Iв, в двигателе образуется ЭДС, соответственно  — следствием , который будет отставать от ∆на 90 0 , но будет опережать ,на 90 0 . Соответственно с сети будет забираться реактивная составляющая. На рисунке б) приведена векторная диаграмма для данного случая.
— следствием , который будет отставать от ∆на 90 0 , но будет опережать ,на 90 0 . Соответственно с сети будет забираться реактивная составляющая. На рисунке б) приведена векторная диаграмма для данного случая.
Можно сделать вывод, что синхронный компенсатор работает в двух режимах: компенсации и потребления реактивной составляющей. Это значит что он может не только отдавать но и потреблять, что позволяет поддерживать баланс мощности в цепи. Он снабжается автоматической системой управления возбуждением и в автоматическом режиме регулирует cosφ цепи. Также обладает большой инерционностью, что не позволяет ему быстро реагировать на изменение параметров цепи. При установке его в сеть с резко-переменной нагрузкой нужно максимально оптимизировать настройки регуляторов САУ, чтоб машина не пошла в разнос, так как это чревато аварийными отключением подстанции из-за бросков тока в сеть. Строятся на мощность до Sн = 100 000 кВА. Имеют явнополюсную конструкцию с 2р= 6 или 8 — тихоходные. Компенсаторы большой мощности делаются с водородным охлаждением.
Для асинхронного пуска снабжаются пусковыми обмотками в полюсных наконечниках или делают их с массивными полюсами. Пускаться они могут как прямым пуском, так и с помощью реакторов. Иногда используют гонный асинхронный двигатель для разгона машины до подсинхронной скорости. Наиболее часто имеют напряжение питания статора 6 кВ, 10 кВ и садятся на соответствующие линии ГПП.
Для возбуждения синхронного компенсатора чаще всего используют тиристорный преобразователь . Он прост в управлении, обладает малой инерционностью, дешев, по сравнению с другими устройствами, не требует постоянного обслуживания и быстро ремонтируем. Современные возбудители оборудованы микропроцессорной системой управления, которые могут в автоматическом режиме вычислять реактивную мощность и регулировать возбуждение машины, тем самым поддерживая баланс мощности. Ниже приведена функциональная схема системы автоматического регулирования (САУ):

Также ранее применялись, а кое-где и до сих пор используются, электромашинное возбуждение. Как правило, работает с очень малой чувствительностью и очень большой инерционностью по отношению к цепи. Дорог в обслуживании и эксплуатации. При выходе из строя долго находится в ремонте. Ниже показана самая примитивная схема электромашинного возбудителя:

Вывод: синхронный компенсатор является обратимым устройством. Он дорог, занимает много места, а также вызывает шум и иногда вибрации. Эксплуатация его не дешевая, а в случае выхода из строя вращающихся элементов требует длительного ремонта. В сравнении с современными средствами компенсации реактивной мощности является устаревшим.